#include <Distance.h>
Distance 連携図
公開メンバ関数 | |
| Distance () | |
| Distanceクラスのコンストラクタ [詳解] | |
| double | calculate (int angle) |
| angleをもとに走行距離を計算する [詳解] | |
| double | getDistance (int leftAngle, int rightAngle) |
| 左右の平均走行距離を計算して戻り値として返す [詳解] | |
詳解
Distance.h の 13 行目に定義があります。
構築子と解体子
◆ Distance()
| Distance::Distance | ( | ) |
関数詳解
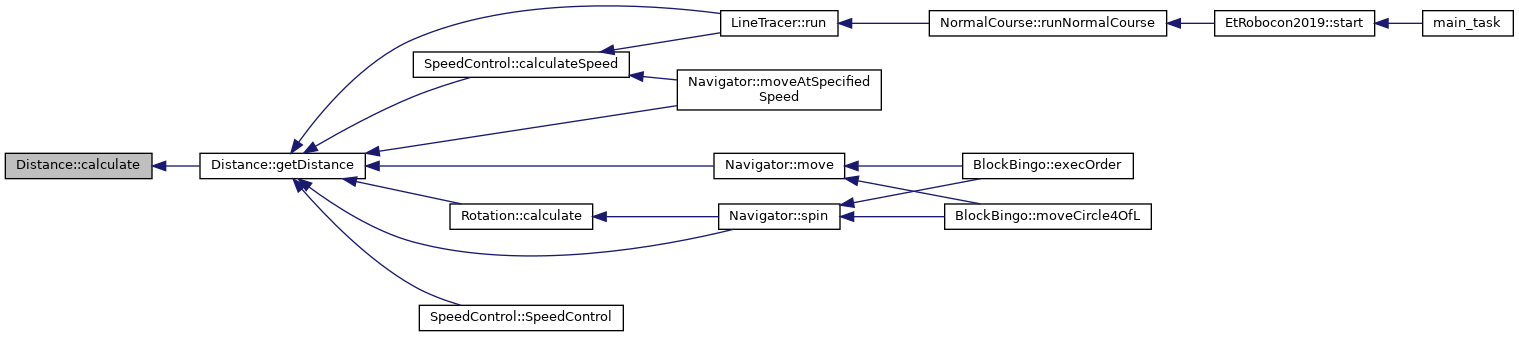
◆ calculate()
| double Distance::calculate | ( | int | angle | ) |
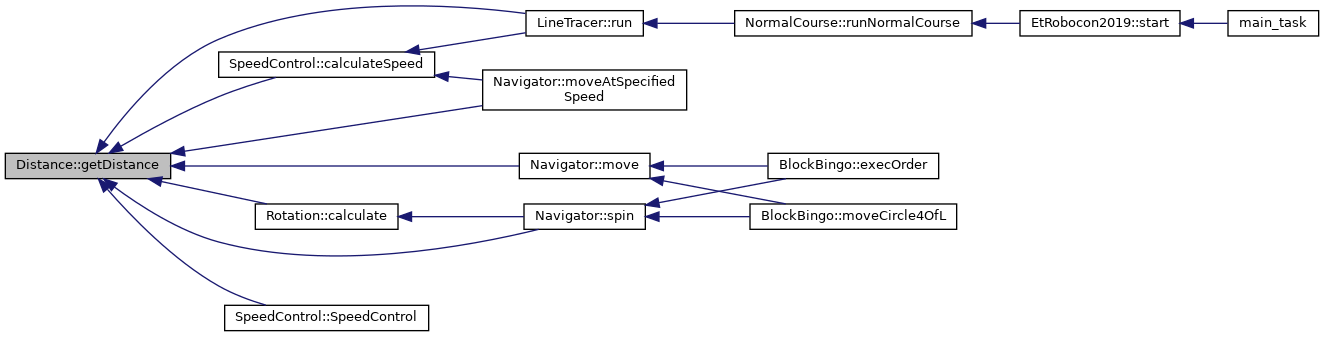
◆ getDistance()
| double Distance::getDistance | ( | int | leftAngle, |
| int | rightAngle | ||
| ) |
左右の平均走行距離を計算して戻り値として返す
左右の平均走行距離を取得する
- 引数
-
leftAngle 左側のタイヤの回転角度[deg] rightAngle 右側のタイヤの回転角度[deg]
- 戻り値
- [走行距離(mm)。走行体が前へ進んでいたら正、後ろへ進んでいたら負になる]
Distance.cpp の 15 行目に定義があります。
呼び出し関係図:

被呼び出し関係図:
このクラス詳解は次のファイルから抽出されました:
- src/module/Distance.h
- src/module/Distance.cpp
