|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
走行体の位置情報をまとめた構造体 [詳解]
#include <WheelOdometry.h>
公開メンバ関数 | |
| Coordinate () | |
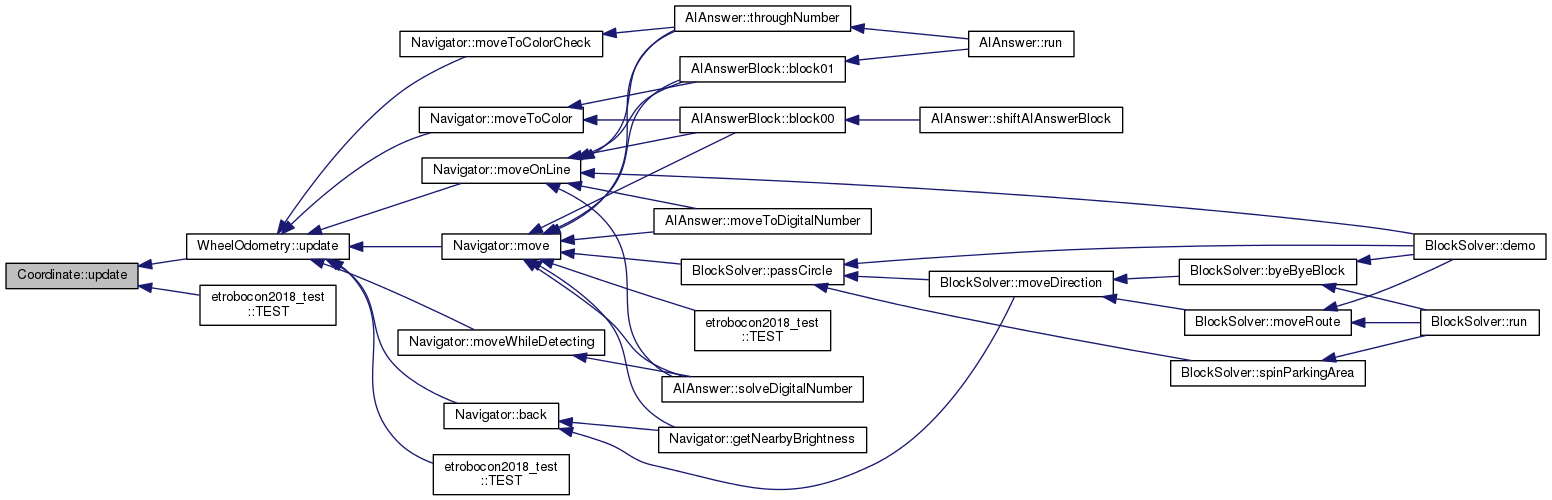
| void | update (float distance, float angle) |
| 走行体の位置情報を更新する [詳解] | |
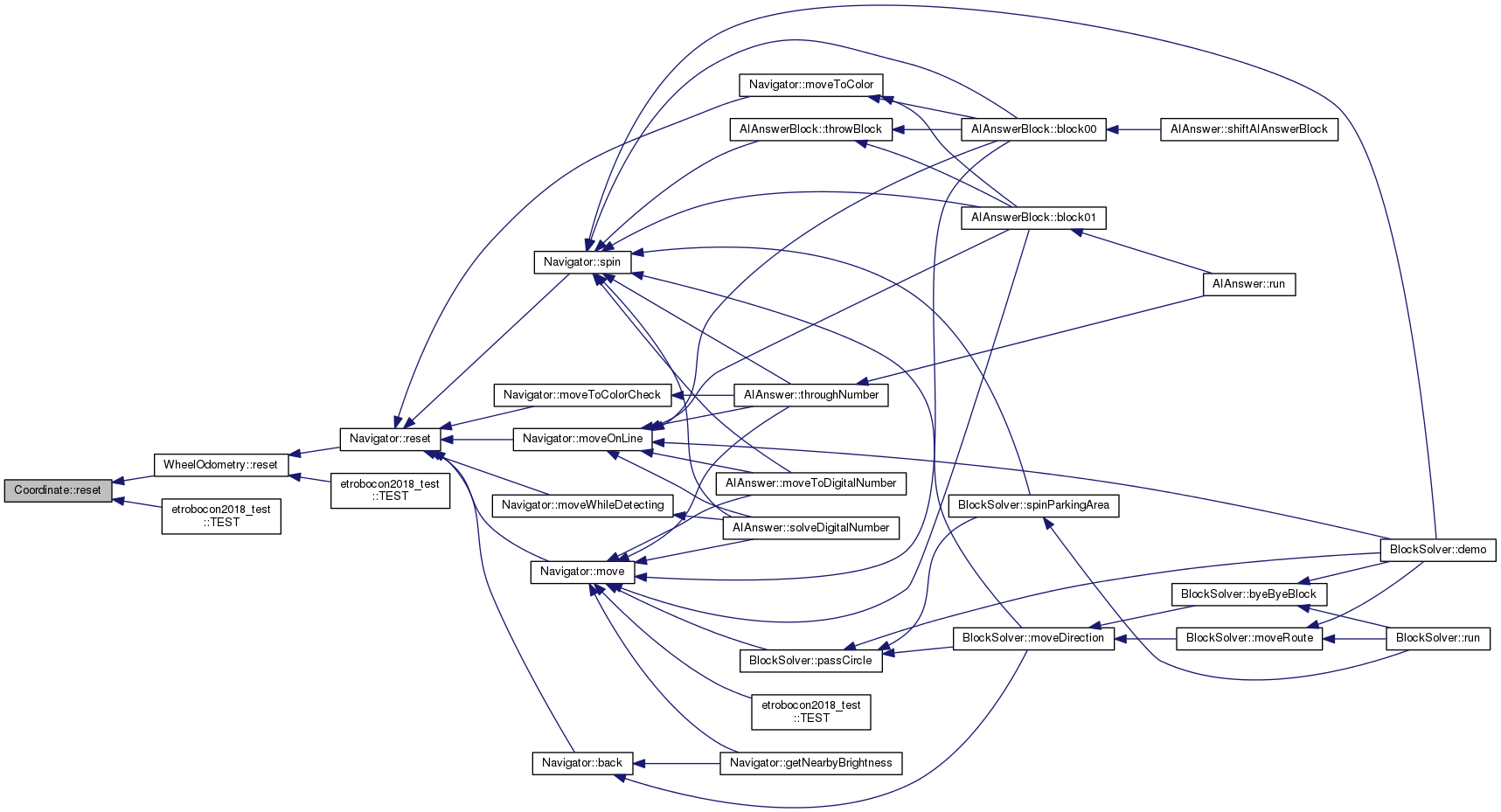
| void | reset () |
| 走行体の位置情報を初期化する [詳解] | |
公開変数類 | |
| float | radius |
| float | arg |
| float | x |
| float | y |
走行体の位置情報をまとめた構造体
WheelOdometry.h の 16 行目に定義があります。
|
inline |
WheelOdometry.h の 21 行目に定義があります。
| void Coordinate::reset | ( | void | ) |
| void Coordinate::update | ( | float | distance, |
| float | angle | ||
| ) |
走行体の位置情報を更新する
| 走行体の移動距離(円弧) | [mm] |
| 走行体の旋回半径 | [deg] |
WheelOdometry.cpp の 9 行目に定義があります。
| float Coordinate::arg |
WheelOdometry.h の 18 行目に定義があります。
| float Coordinate::radius |
WheelOdometry.h の 17 行目に定義があります。
| float Coordinate::x |
WheelOdometry.h の 19 行目に定義があります。
| float Coordinate::y |
WheelOdometry.h の 20 行目に定義があります。
 1.8.6
1.8.6