#include <Calibrator.h>
Calibrator 連携図
公開メンバ関数 | |
| Calibrator (Controller &controller_) | |
| bool | calibration () |
| falseが返ってきた場合、エラーメッセージがLCDに出ます。スタートを取りやめ、原因をさぐってください。 [詳解] | |
| bool | getCameraMode () const |
| bool | isLeftCourse () const |
| int | getWhiteBrightness () const |
| int | getBlackBrightness () const |
| bool | setCameraMode () |
| bool | setLRCourse () |
| bool | setBrightness (Brightness brightness) |
詳解
Calibrator.h の 15 行目に定義があります。
構築子と解体子
◆ Calibrator()
|
explicit |
Calibrator.cpp の 8 行目に定義があります。
関数詳解
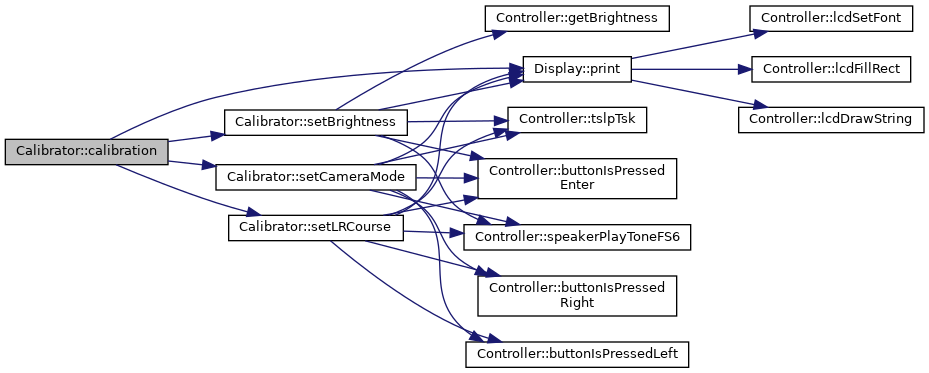
◆ calibration()
| bool Calibrator::calibration | ( | ) |
falseが返ってきた場合、エラーメッセージがLCDに出ます。スタートを取りやめ、原因をさぐってください。
キャリブレーションを行う。
- 戻り値
- キャリブレーションが成功したかどうかの真理値(Trueなら正常終了)
Calibrator.cpp の 17 行目に定義があります。
呼び出し関係図:
被呼び出し関係図:

◆ getBlackBrightness()
| int Calibrator::getBlackBrightness | ( | ) | const |

◆ getCameraMode()
| bool Calibrator::getCameraMode | ( | ) | const |
◆ getWhiteBrightness()
| int Calibrator::getWhiteBrightness | ( | ) | const |

◆ isLeftCourse()
| bool Calibrator::isLeftCourse | ( | ) | const |
Leftコースであるかどうかを判断する。
- 戻り値
- Leftコースであるかどうかの真偽値(TrueならLeftコース)
Calibrator.cpp の 155 行目に定義があります。
被呼び出し関係図:

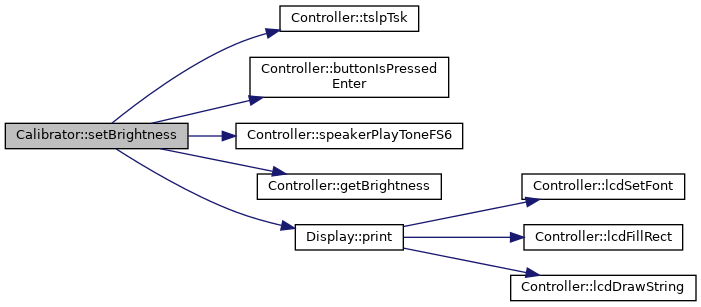
◆ setBrightness()
| bool Calibrator::setBrightness | ( | Brightness | brightness | ) |
明るさを設定する。
- 引数
-
brightness 白か黒かの明るさ
- 戻り値
- 正常終了したかどうかの真偽値(Trueなら正常終了)
Calibrator.cpp の 99 行目に定義があります。
static void speakerPlayToneFS6(int duration)
Definition: Controller.cpp:21
呼び出し関係図:
被呼び出し関係図:

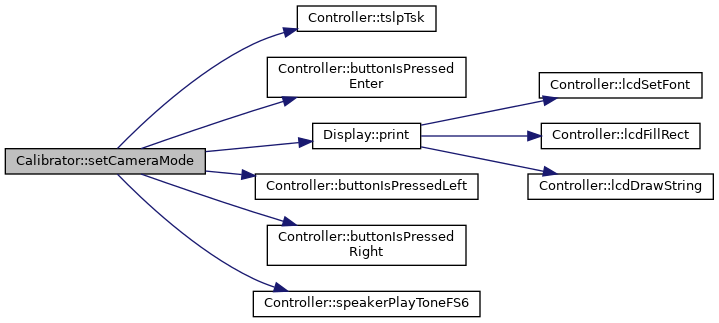
◆ setCameraMode()
| bool Calibrator::setCameraMode | ( | ) |
カメラシステムを使用するかどうかを設定する
- 戻り値
- 正常終了したかどうかの真偽値(Trueなら正常終了)
Calibrator.cpp の 47 行目に定義があります。
static void speakerPlayToneFS6(int duration)
Definition: Controller.cpp:21
呼び出し関係図:
被呼び出し関係図:

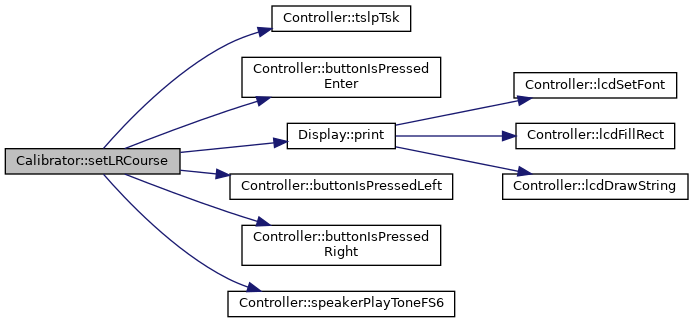
◆ setLRCourse()
| bool Calibrator::setLRCourse | ( | ) |
LコースかRコースかを設定する。
- 戻り値
- 正常終了したかどうかの真偽値(Trueなら正常終了)
Calibrator.cpp の 73 行目に定義があります。
static void speakerPlayToneFS6(int duration)
Definition: Controller.cpp:21
呼び出し関係図:
被呼び出し関係図:

このクラス詳解は次のファイルから抽出されました:
- src/module/Calibrator.h
- src/module/Calibrator.cpp
