|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
走行体のカラーセンサを用いて、RGB情報より色を推定するクラス。 [詳解]
#include "Distinguisher.h"
公開メンバ関数 | |
| Distinguisher (Controller &controller_) | |
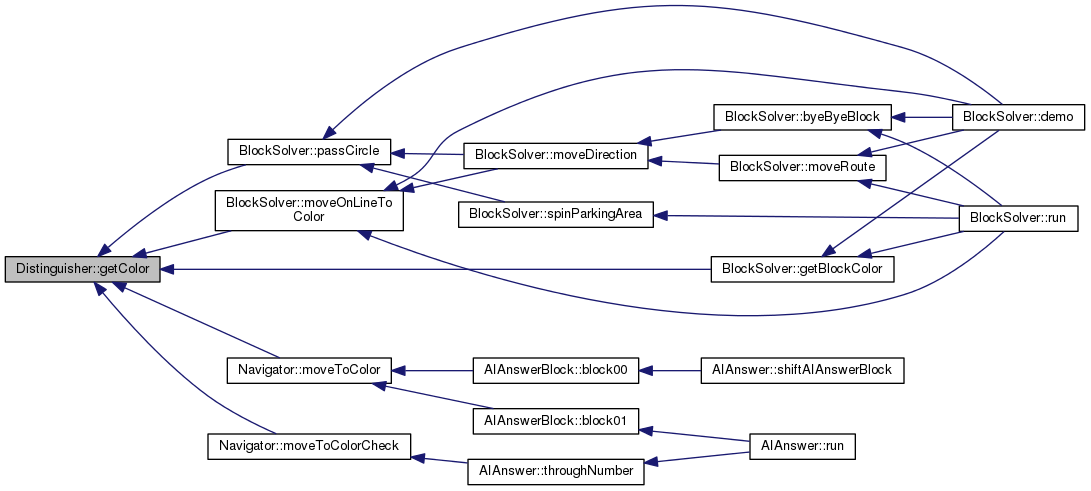
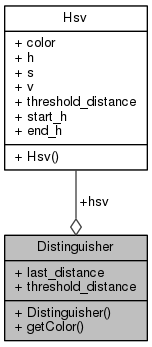
| Color | getColor () |
公開変数類 | |
| double | last_distance = 0.0 |
| double | threshold_distance = 400 |
| Hsv | hsv { Color::NONE, 0, 0, 0, 400, 0, 0 } |
フレンド | |
| class | etrobocon2018_test::DistinguisherTest |
走行体のカラーセンサを用いて、RGB情報より色を推定するクラス。
Distinguisher.h の 55 行目に定義があります。
|
inlineexplicit |
| Color Distinguisher::getColor | ( | ) |
|
friend |
Distinguisher.h の 56 行目に定義があります。
| Hsv Distinguisher::hsv { Color::NONE, 0, 0, 0, 400, 0, 0 } |
Distinguisher.h の 73 行目に定義があります。
| double Distinguisher::last_distance = 0.0 |
最後にgetColorした際の色距離
Distinguisher.h の 68 行目に定義があります。
| double Distinguisher::threshold_distance = 400 |
getColorする際の最低限必要な色距離
Distinguisher.h の 71 行目に定義があります。
 1.8.6
1.8.6