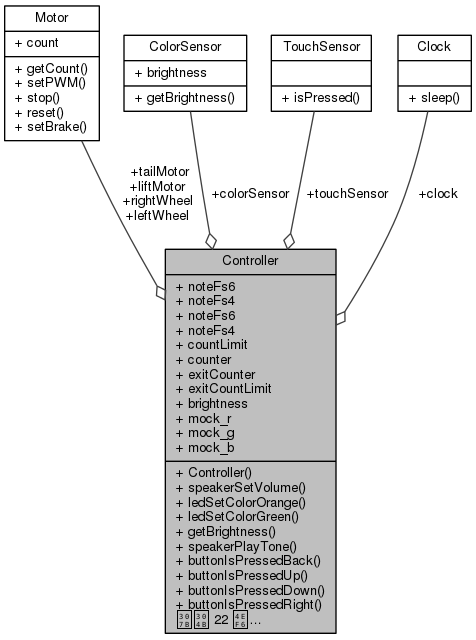
#include <Controller.h>
|
| | Controller () |
| |
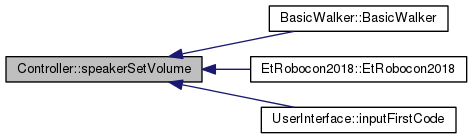
| void | speakerSetVolume (uint8_t volume) |
| |
| void | ledSetColorOrange () |
| |
| void | ledSetColorGreen () |
| |
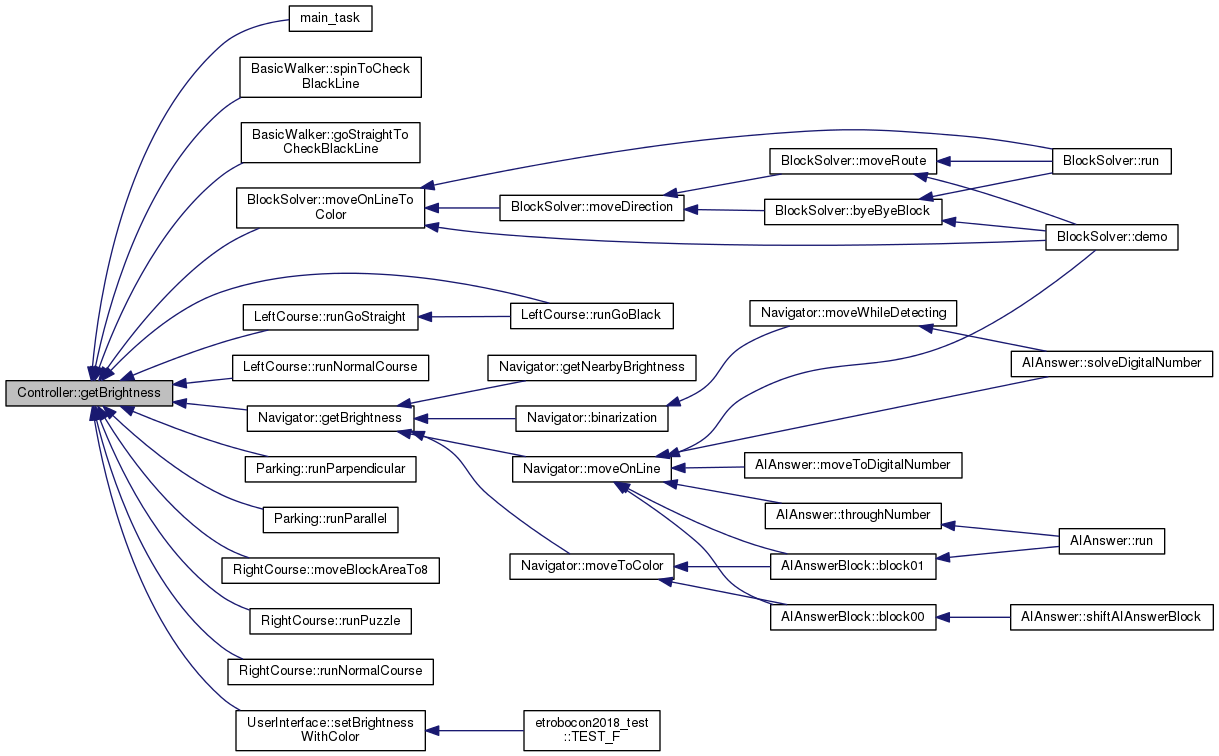
| int16_t | getBrightness () |
| |
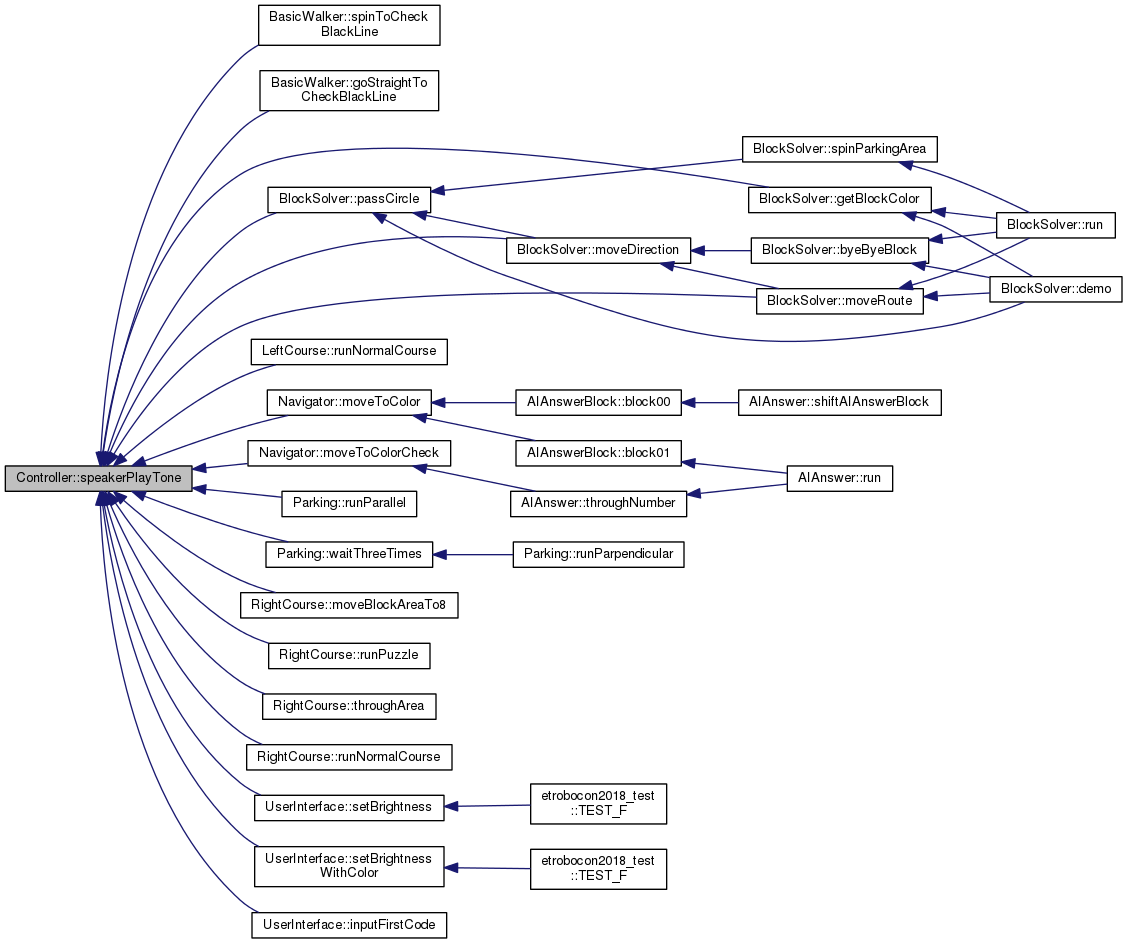
| void | speakerPlayTone (uint16_t frequency, int32_t duration) |
| |
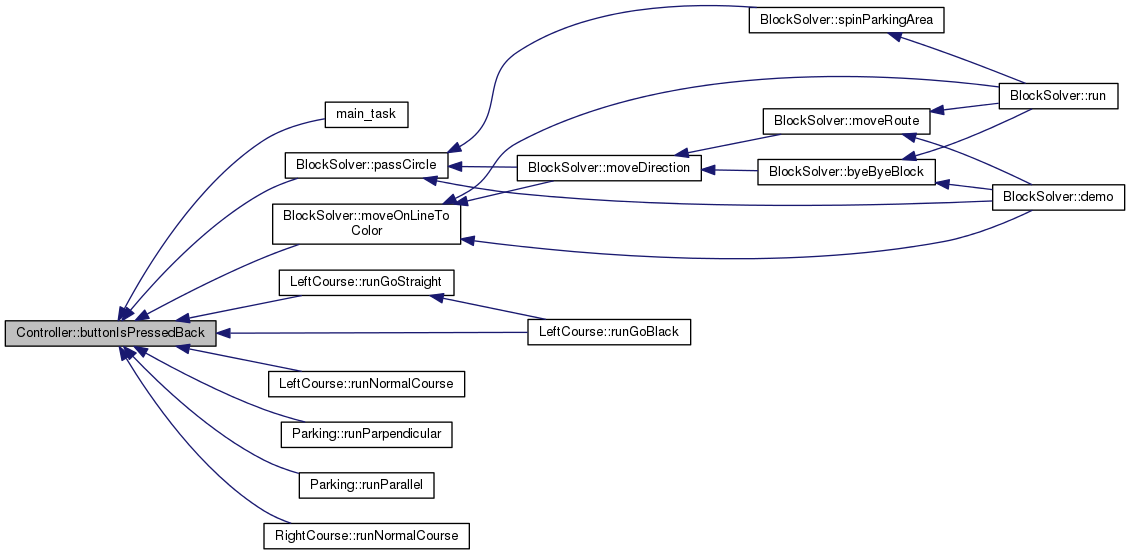
| bool | buttonIsPressedBack () |
| |
| bool | buttonIsPressedUp () |
| |
| bool | buttonIsPressedDown () |
| |
| bool | buttonIsPressedRight () |
| |
| bool | buttonIsPressedLeft () |
| |
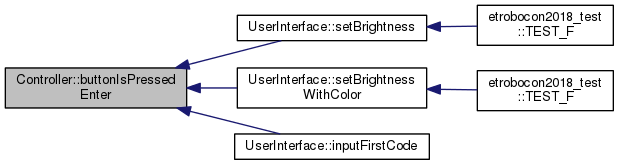
| bool | buttonIsPressedEnter () |
| |
| float | measureBatteryVoltage () |
| |
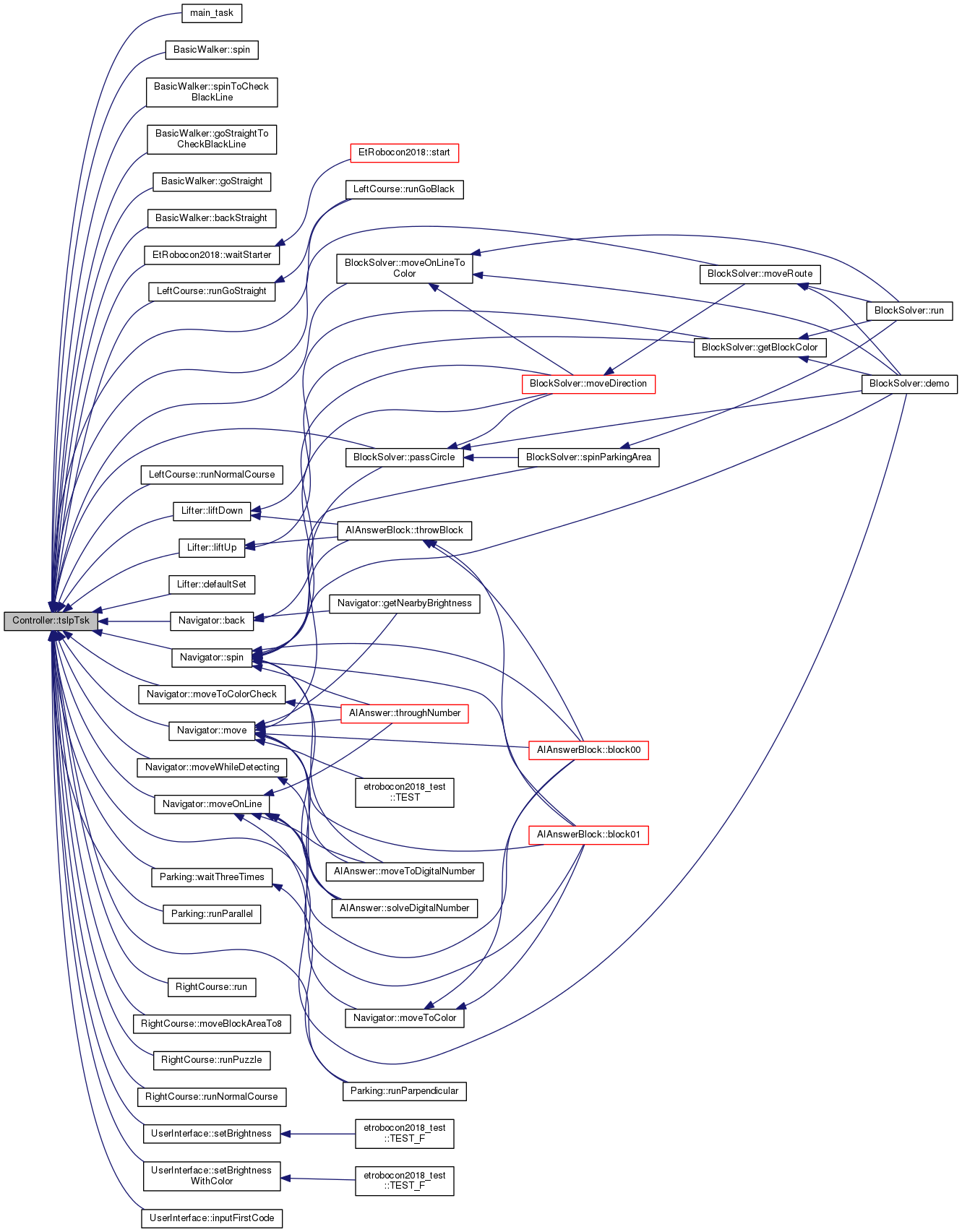
| void | tslpTsk (int16_t time) |
| |
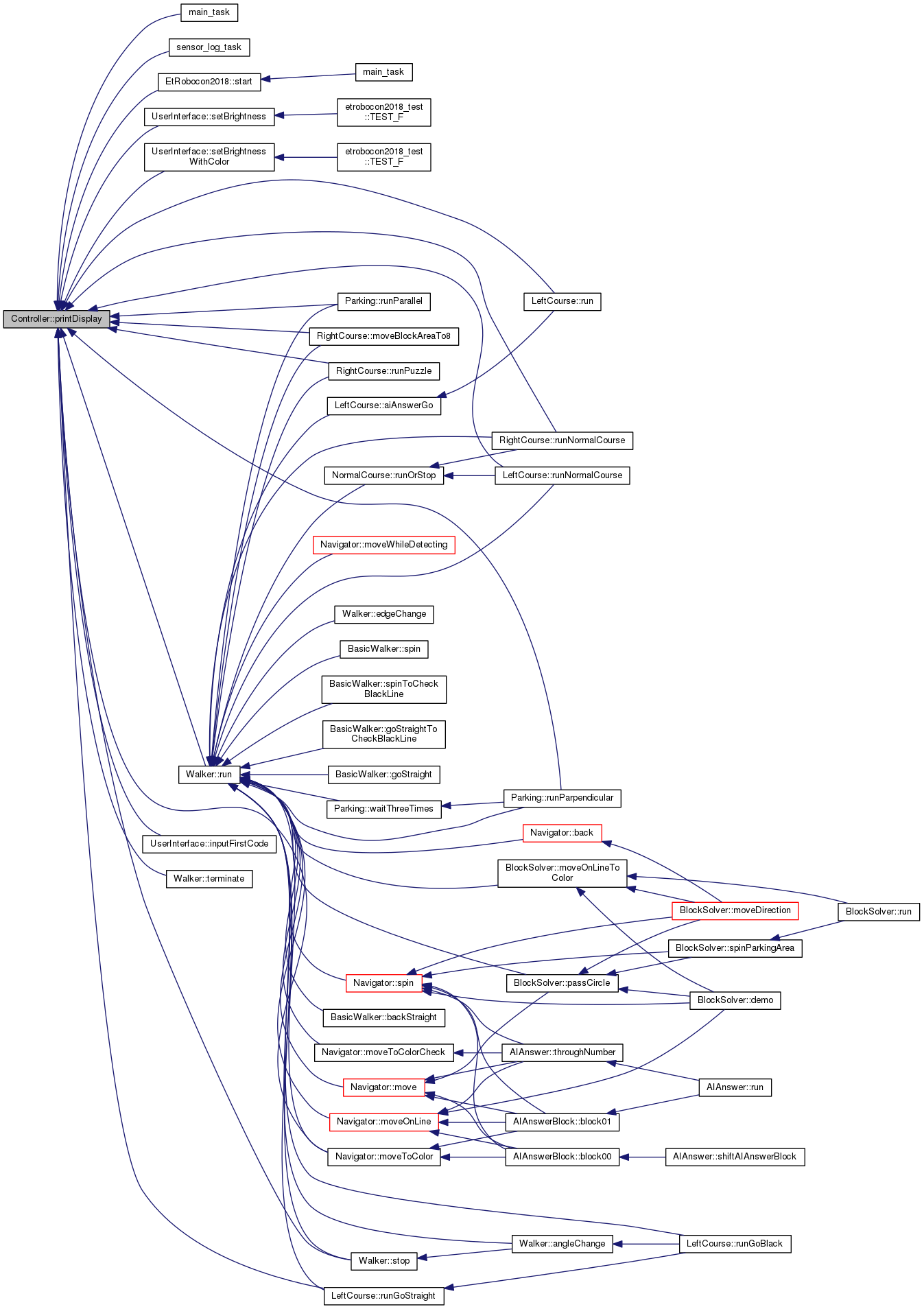
| void | printDisplay (int8_t row, const char *format,...) |
| |
| void | getRawColor (uint16_t &r, uint16_t &g, uint16_t &b) |
| |
| | Controller () |
| |
| void | speakerSetVolume (int volume) |
| |
| void | ledSetColorOrange () |
| |
| void | ledSetColorGreen () |
| |
| int | getBrightness () |
| |
| void | speakerPlayTone (int frequency, int duration) |
| |
| bool | buttonIsPressedBack () |
| |
| void | getRawColor (std::uint16_t &r, std::uint16_t &g, std::uint16_t &b) |
| |
| bool | buttonIsPressedUp () |
| |
| bool | buttonIsPressedDown () |
| |
| bool | buttonIsPressedRight () |
| |
| bool | buttonIsPressedLeft () |
| |
| bool | buttonIsPressedEnter () |
| |
| void | tslpTsk (int time) |
| |
| void | printDisplay (int row, const char *format,...) |
| |
| void | setMockRgb (std::uint16_t r, std::uint16_t g, std::uint16_t b) |
| |
Controller.h の 29 行目に定義があります。
| Controller::Controller |
( |
| ) |
|
|
inline |
| Controller::Controller |
( |
| ) |
|
|
inline |
| bool Controller::buttonIsPressedBack |
( |
| ) |
|
| bool Controller::buttonIsPressedBack |
( |
| ) |
|
|
inline |
| bool Controller::buttonIsPressedDown |
( |
| ) |
|
| bool Controller::buttonIsPressedDown |
( |
| ) |
|
|
inline |
| bool Controller::buttonIsPressedEnter |
( |
| ) |
|
| bool Controller::buttonIsPressedEnter |
( |
| ) |
|
|
inline |
| bool Controller::buttonIsPressedLeft |
( |
| ) |
|
| bool Controller::buttonIsPressedLeft |
( |
| ) |
|
|
inline |
| bool Controller::buttonIsPressedRight |
( |
| ) |
|
| bool Controller::buttonIsPressedRight |
( |
| ) |
|
|
inline |
| bool Controller::buttonIsPressedUp |
( |
| ) |
|
| bool Controller::buttonIsPressedUp |
( |
| ) |
|
|
inline |
| int16_t Controller::getBrightness |
( |
| ) |
|
Controller.cpp の 59 行目に定義があります。
62 int16_t luminance = 0.298912 * rgb.r + 0.586611 * rgb.g + 0.114478 * rgb.b;
void getRawColor(rgb_raw_t &rgb) const
| int Controller::getBrightness |
( |
| ) |
|
|
inline |
| void Controller::getRawColor |
( |
std::uint16_t & |
r, |
|
|
std::uint16_t & |
g, |
|
|
std::uint16_t & |
b |
|
) |
| |
|
inline |
| void Controller::getRawColor |
( |
uint16_t & |
r, |
|
|
uint16_t & |
g, |
|
|
uint16_t & |
b |
|
) |
| |
| void Controller::ledSetColorGreen |
( |
| ) |
|
| void Controller::ledSetColorGreen |
( |
| ) |
|
|
inline |
| void Controller::ledSetColorOrange |
( |
| ) |
|
| void Controller::ledSetColorOrange |
( |
| ) |
|
|
inline |
| float Controller::measureBatteryVoltage |
( |
| ) |
|
| void Controller::printDisplay |
( |
int8_t |
row, |
|
|
const char * |
format, |
|
|
|
... |
|
) |
| |
Controller.cpp の 79 行目に定義があります。
83 va_start(arg, format);
84 vsprintf(msg, format, arg);
87 const int8_t line_height = 10;
88 ev3_lcd_fill_rect(0, row * line_height, EV3_LCD_WIDTH, line_height, EV3_LCD_WHITE);
89 ev3_lcd_draw_string(msg, 0, row * line_height);
| void Controller::printDisplay |
( |
int |
row, |
|
|
const char * |
format, |
|
|
|
... |
|
) |
| |
|
inline |
| void Controller::setMockRgb |
( |
std::uint16_t |
r, |
|
|
std::uint16_t |
g, |
|
|
std::uint16_t |
b |
|
) |
| |
|
inline |
| void Controller::speakerPlayTone |
( |
uint16_t |
frequency, |
|
|
int32_t |
duration |
|
) |
| |
Controller.cpp の 9 行目に定義があります。
11 ev3_speaker_play_tone(frequency, duration);
| void Controller::speakerPlayTone |
( |
int |
frequency, |
|
|
int |
duration |
|
) |
| |
|
inline |
| void Controller::speakerSetVolume |
( |
uint8_t |
volume | ) |
|
| void Controller::speakerSetVolume |
( |
int |
volume | ) |
|
|
inline |
| void Controller::tslpTsk |
( |
int16_t |
time | ) |
|
| void Controller::tslpTsk |
( |
int |
time | ) |
|
|
inline |
| int Controller::brightness = 0 |
| int Controller::counter = 0 |
| int Controller::countLimit = 100 |
| int Controller::exitCounter = 0 |
| int Controller::exitCountLimit = 1000 |
| Motor Controller::leftWheel |
| Motor Controller::liftMotor |
| std::uint16_t Controller::mock_b |
| std::uint16_t Controller::mock_g |
| std::uint16_t Controller::mock_r |
| uint16_t Controller::noteFs4 = NOTE_FS4 |
| int Controller::noteFs4 = 0 |
| uint16_t Controller::noteFs6 = NOTE_FS6 |
| int Controller::noteFs6 = 0 |
| Motor Controller::rightWheel |
| Motor Controller::tailMotor |
このクラス詳解は次のファイルから抽出されました:


 1.8.6
1.8.6