|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <Motor.h>
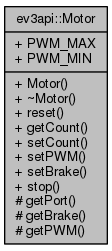
公開メンバ関数 | |
| Motor (ePortM port, bool brake=true, motor_type_t type=LARGE_MOTOR) | |
| ~Motor (void) | |
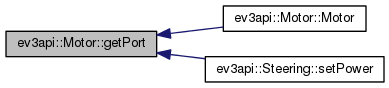
| void | reset (void) |
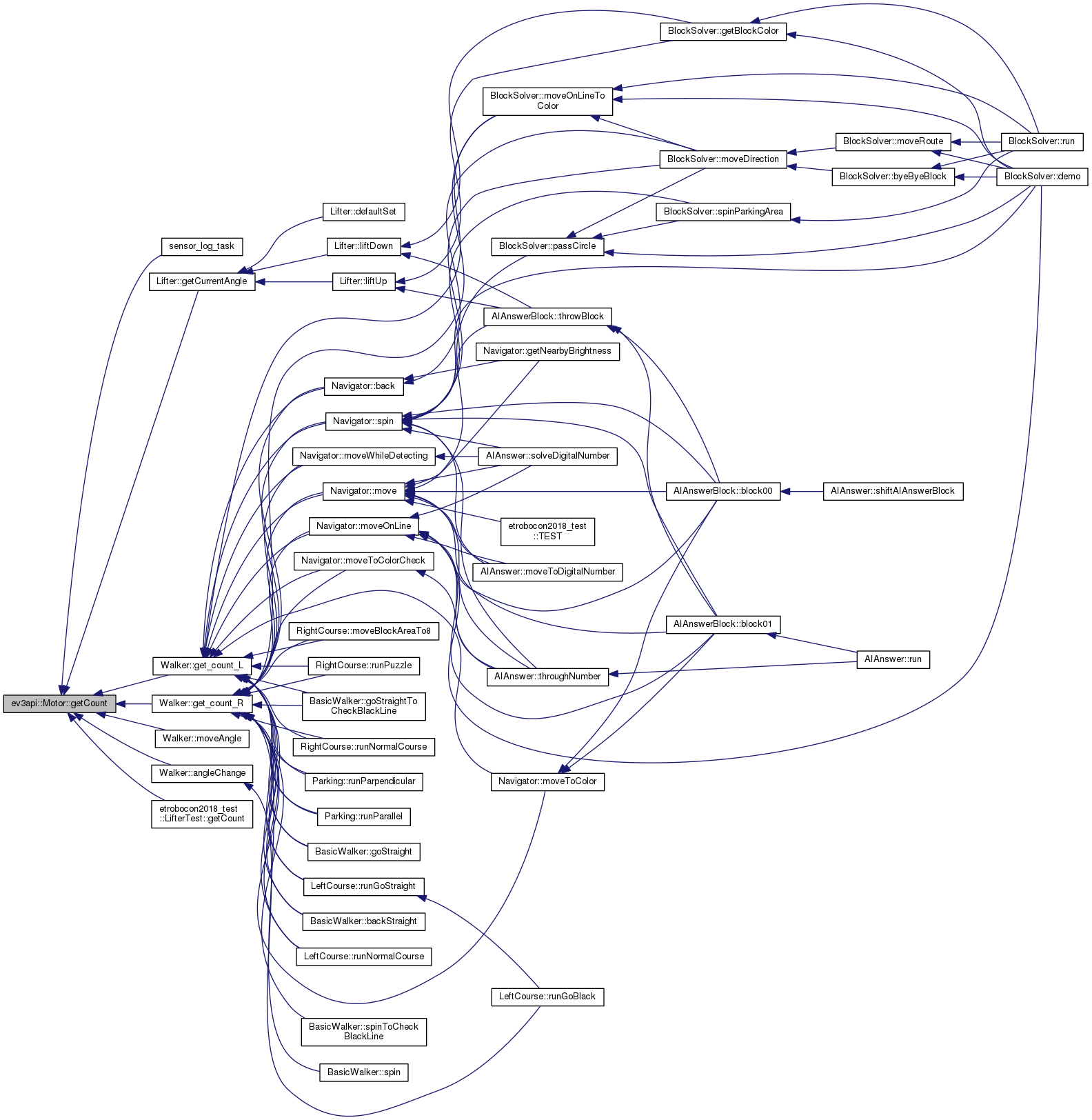
| int32_t | getCount (void) const |
| void | setCount (int32_t count) |
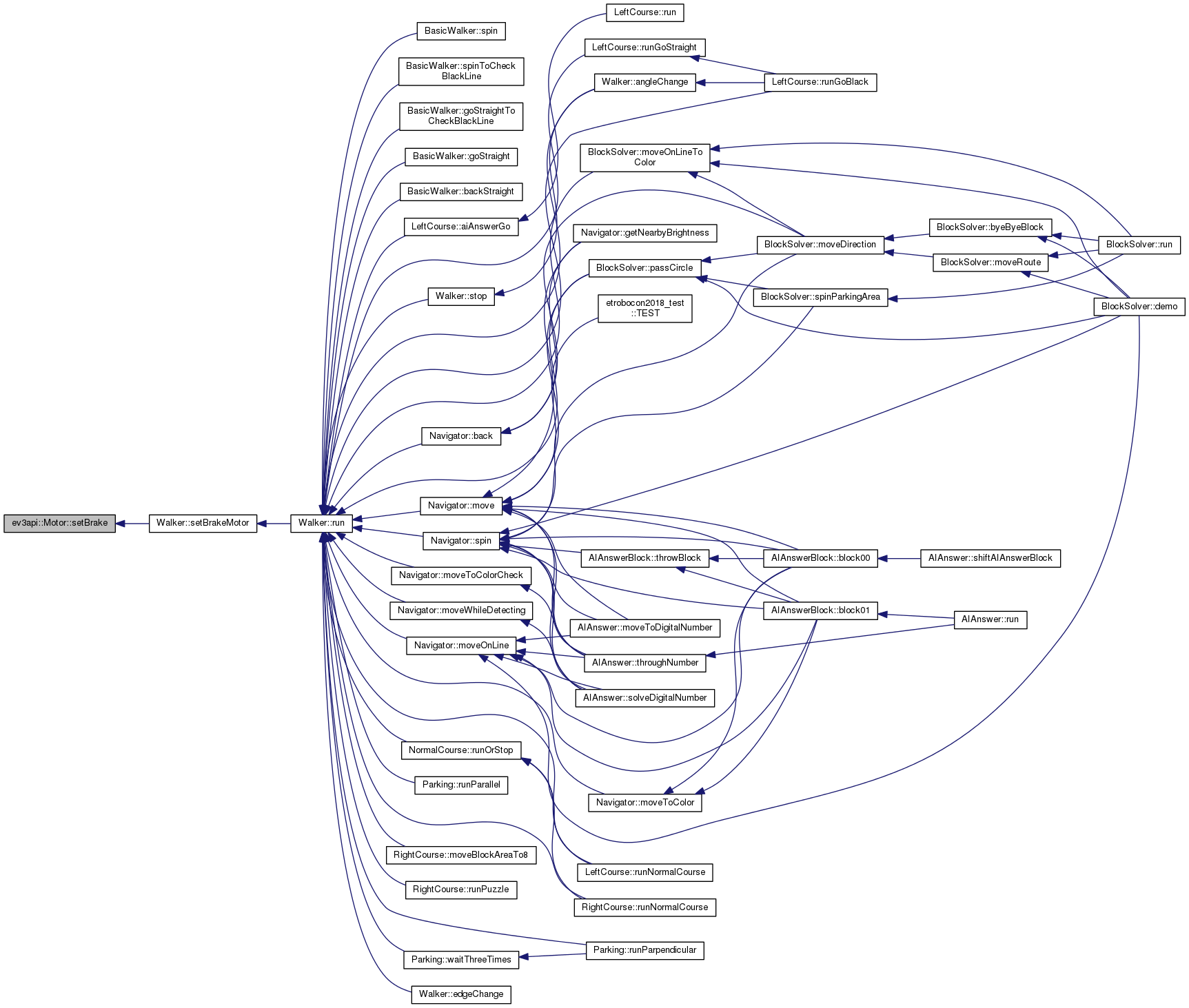
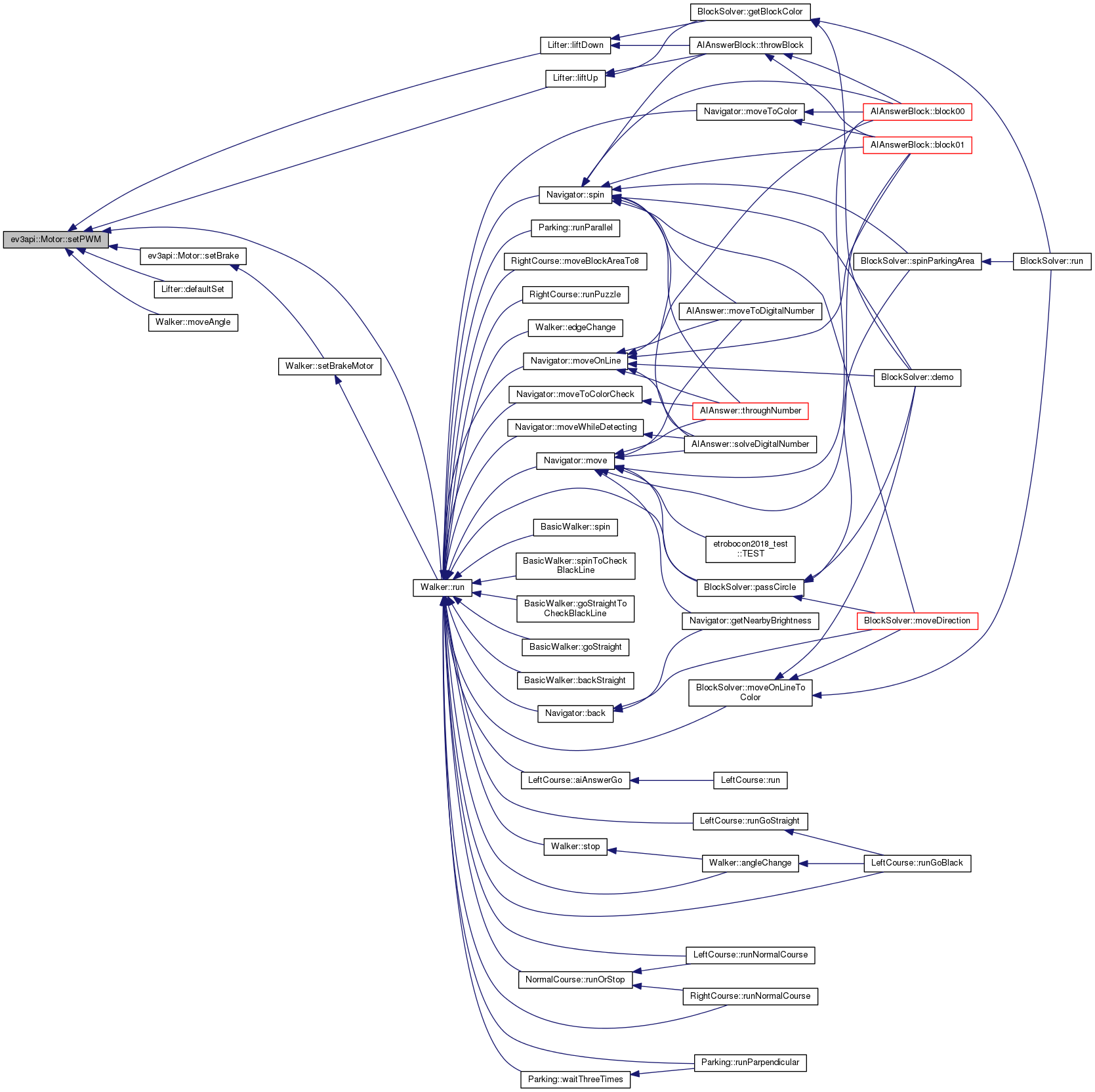
| void | setPWM (int pwm) |
| void | setBrake (bool brake) |
| void | stop () |
静的公開変数類 | |
| static const int | PWM_MAX = 100 |
| static const int | PWM_MIN = -100 |
限定公開メンバ関数 | |
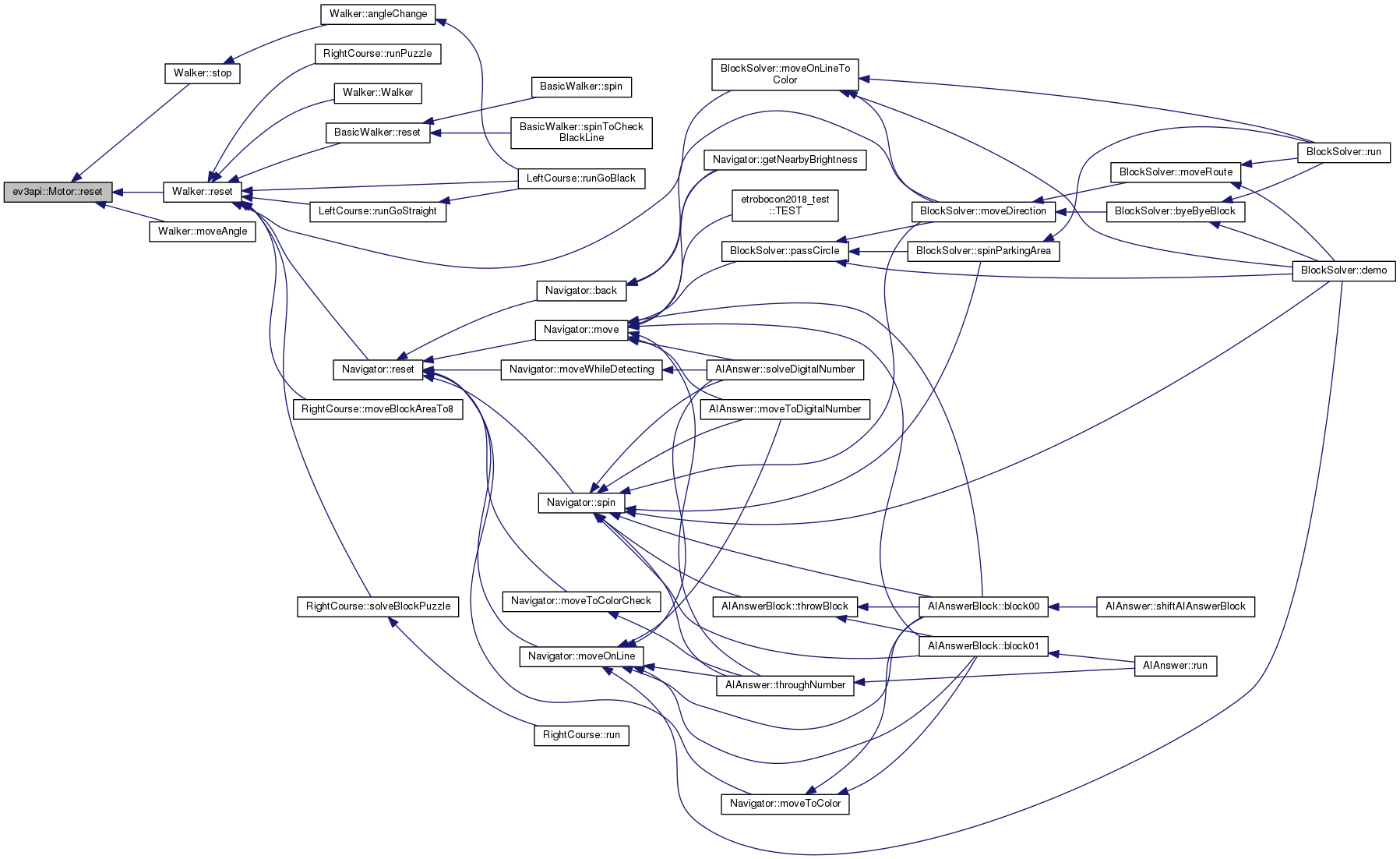
| motor_port_t | getPort (void) const |
| bool | getBrake (void) const |
| int | getPWM (void) const |
フレンド | |
| class | Steering |
|
explicit |
コンストラクタ
| port | モータポート番号 |
| brake | true:ブレーキモード/false:フロートモード |
| type | モータタイプ |

| Motor::~Motor | ( | void | ) |
|
inlineprotected |
|
inline |
|
inlineprotected |
|
inlineprotected |
|
inline |
| void Motor::setBrake | ( | bool | brake | ) |
ブレーキモード設定
| brake | true:ブレーキモード/false:フロートモード |

|
inline |
| void Motor::setPWM | ( | int | pwm | ) |
モータPWM値設定
ブレーキモードでPWM値が0の場合、モータを停止する
| pwm | PWM値 (-100 - 100) |
|
inline |
 1.8.6
1.8.6