#include <ColorSensor.h>
カラーセンサクラス
ColorSensor.h の 16 行目に定義があります。
| ColorSensor::ColorSensor |
( |
ePortS |
port | ) |
|
|
explicit |
コンストラクタ
- 引数
-
- 戻り値
- -
ColorSensor.cpp の 12 行目に定義があります。
13 :
Sensor(port, COLOR_SENSOR)
15 (void)ev3_color_sensor_get_reflect(
getPort());
Sensor(ePortS port, sensor_type_t type)
sensor_port_t getPort(void) const
| ColorSensor::~ColorSensor |
( |
void |
| ) |
|
|
virtual |
| uint8_t ColorSensor::getAmbient |
( |
void |
| ) |
const |
環境光の強さを測定する
- 引数
-
- 戻り値
- 環境光の強さ(0〜100)
ColorSensor.cpp の 27 行目に定義があります。
29 return ev3_color_sensor_get_ambient(
getPort());
sensor_port_t getPort(void) const
| int8_t ColorSensor::getBrightness |
( |
void |
| ) |
const |
反射光の強さを測定する
- 引数
-
- 戻り値
- 環境光の強さ (0-100)
ColorSensor.cpp の 34 行目に定義があります。
36 return ev3_color_sensor_get_reflect(
getPort());
sensor_port_t getPort(void) const
| colorid_t ColorSensor::getColorNumber |
( |
void |
| ) |
const |
識別した色を取得する
- 引数
-
- 戻り値
- 識別した色
ColorSensor.cpp の 41 行目に定義があります。
43 return ev3_color_sensor_get_color(
getPort());
sensor_port_t getPort(void) const
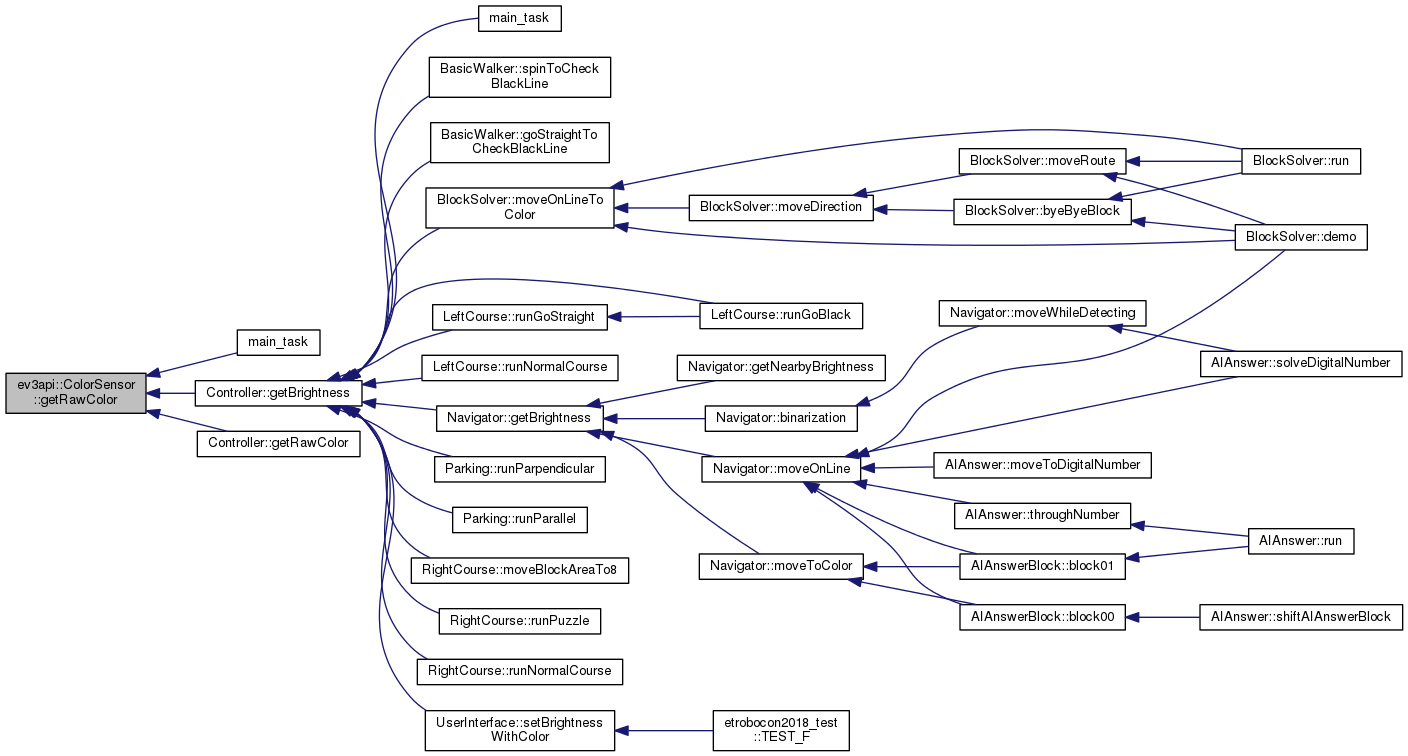
| void ColorSensor::getRawColor |
( |
rgb_raw_t & |
rgb | ) |
const |
RGB Raw値を測定する
- 引数
-
- 戻り値
- -
ColorSensor.cpp の 48 行目に定義があります。
50 ev3_color_sensor_get_rgb_raw(
getPort(), &rgb);
sensor_port_t getPort(void) const
このクラス詳解は次のファイルから抽出されました:
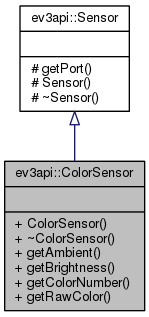
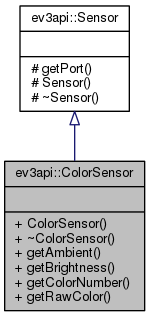
 基底クラス ev3api::Sensor に属する継承限定公開メンバ関数
基底クラス ev3api::Sensor に属する継承限定公開メンバ関数 1.8.6
1.8.6