|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <MotorAngle.h>
公開メンバ関数 | |
| MotorAngle () | |
| 右モータ角度の過去値 [詳解] | |
| void | update (std::int32_t left_motor, std::int32_t right_motor) |
| 左右モータ角度の過去値を現在値へ更新する [詳解] | |
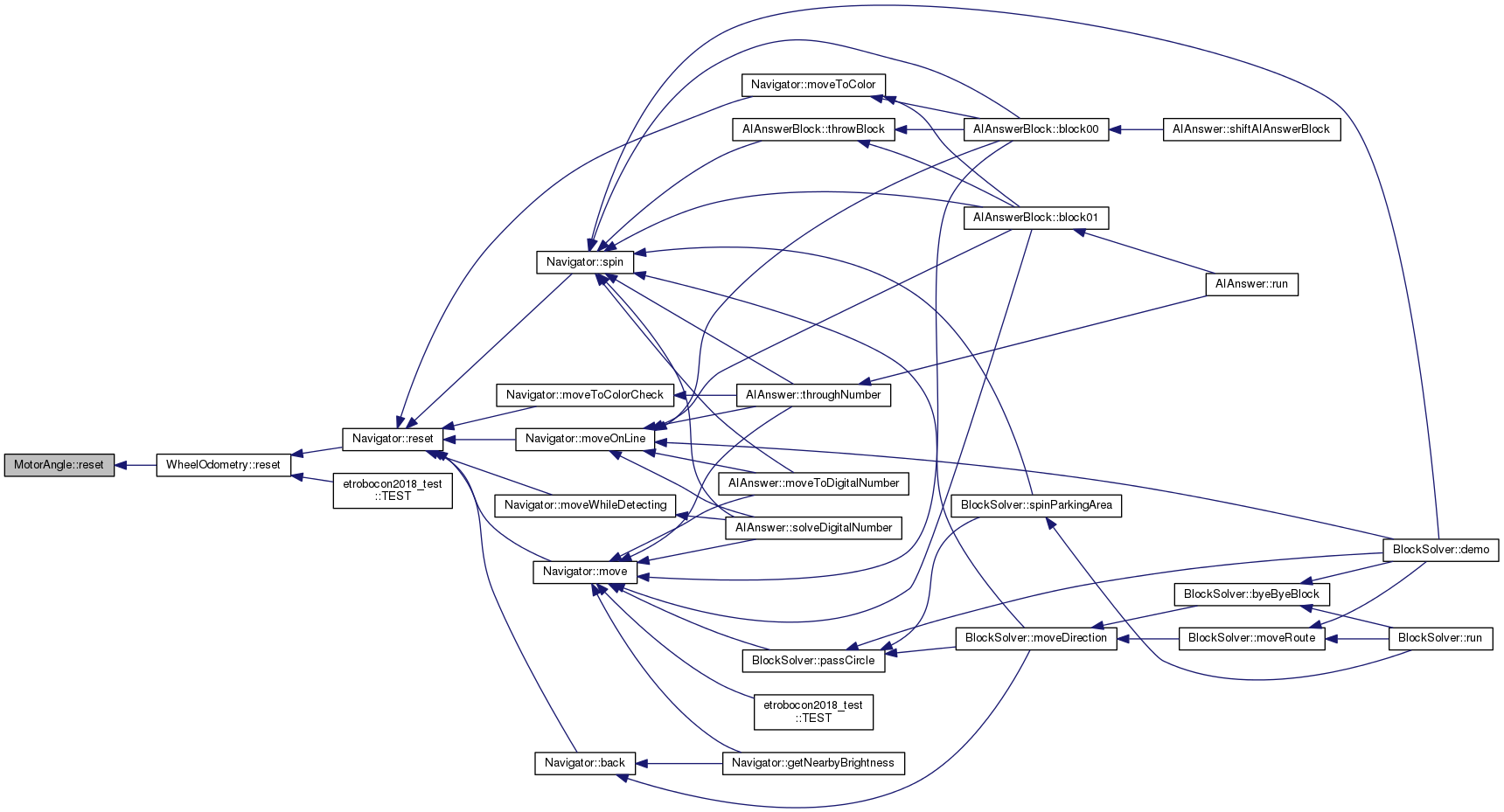
| void | reset () |
| 左右モータ角度の過去値を0にリセットする [詳解] | |
| float | absoluteAngleMean (std::int32_t left_motor, std::int32_t right_motor) |
| 左右モータの絶対角度の平均値を計算する [詳解] | |
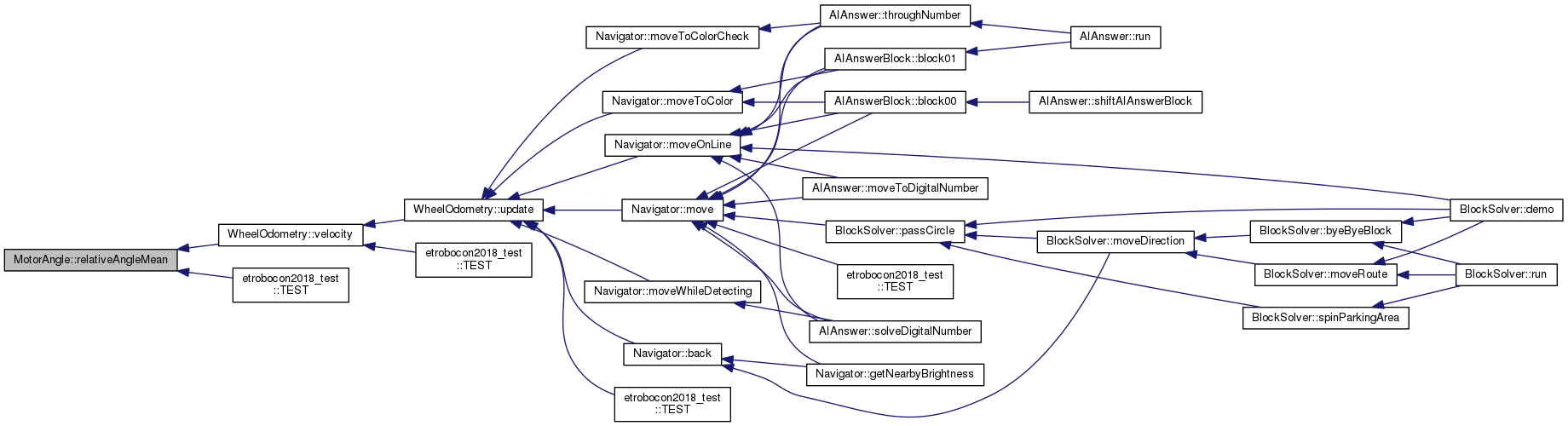
| float | relativeAngleMean (std::int32_t current_left_motor, std::int32_t current_right_motor) |
| 左右モータの相対角度の平均値を計算する [詳解] | |
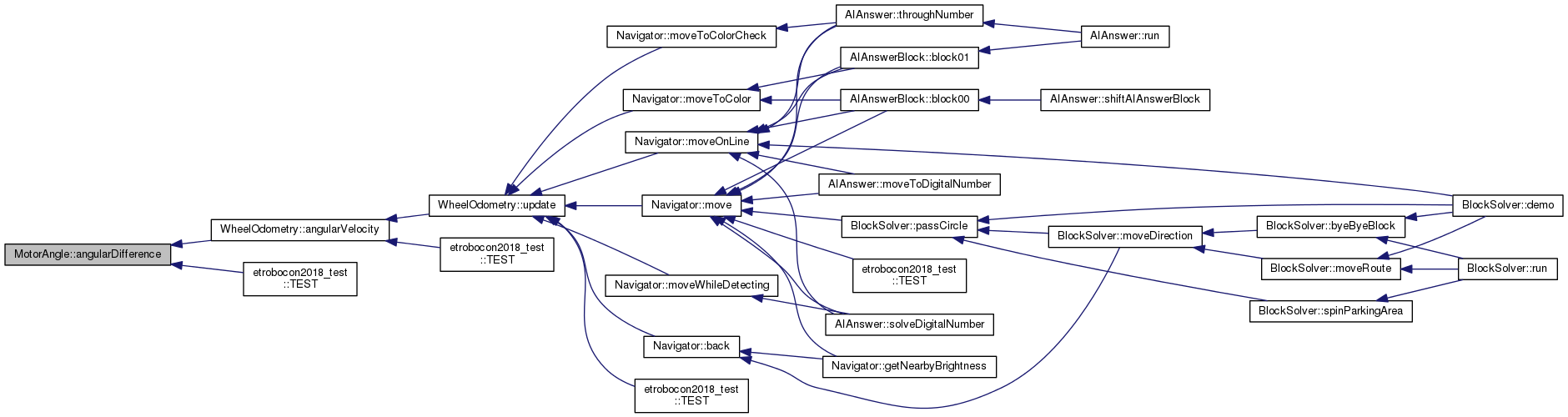
| float | angularDifference (std::int32_t left_motor, std::int32_t right_motor) |
| 左右モータ角度の差を計算する(右手系/反時計回りが正) [詳解] | |
| std::int32_t | absoluteValueOfAngle (std::int32_t motor) |
| モータ角度の絶対値を計算する [詳解] | |
| MotorAngle (std::int32_t degree) | |
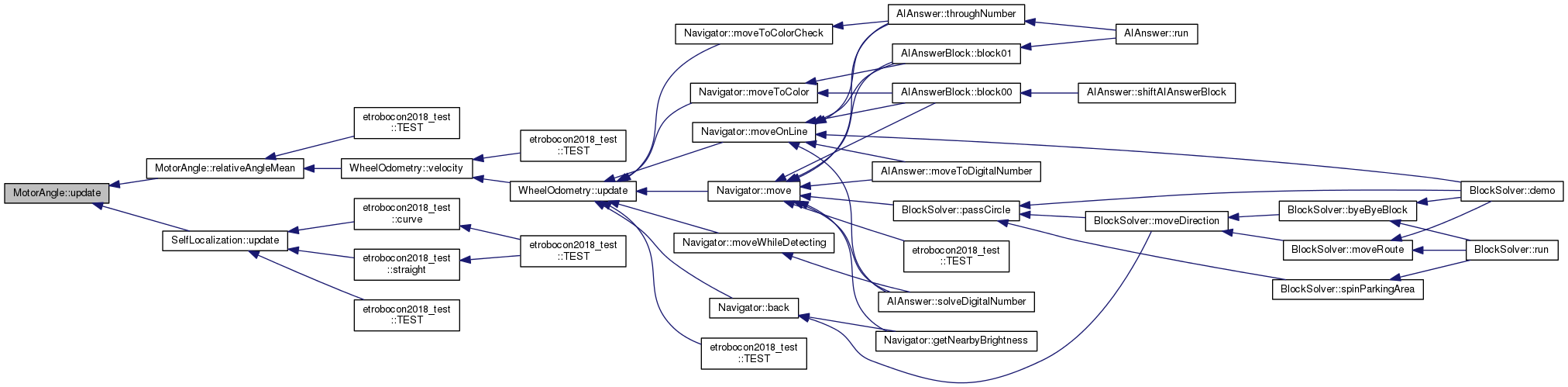
| void | update (std::int32_t update_degree) |
公開変数類 | |
| std::int32_t | current_angle |
| std::int32_t | old_angle |
| std::int32_t | rotation_angle |
| float | moving_distance |
| float | wheel_across |
MotorAngle.h の 10 行目に定義があります。
|
inline |
|
inline |
SelfLocalization.h の 29 行目に定義があります。
| float MotorAngle::absoluteAngleMean | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
左右モータの絶対角度の平均値を計算する
左モータと右モータの絶対角度の平均値を計算する
[MotorAngle::absoluteAngleMean]
| left_motor | 左モータ角度の現在値 |
| right_motor | 右モータ角度の現在値 |
MotorAngle.cpp の 39 行目に定義があります。
| std::int32_t MotorAngle::absoluteValueOfAngle | ( | std::int32_t | motor | ) |
モータ角度の絶対値を計算する
[MotorAngle::absoluteValueOfAngle]
| モータ角度 |
MotorAngle.cpp の 83 行目に定義があります。
| float MotorAngle::angularDifference | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
左右モータ角度の差を計算する(右手系/反時計回りが正)
左右モータの回転角の差を計算する(右手系/反時計回りが正)
[MotorAngle::angularDifference]
| left_motor | 左モータ角度の現在値 |
| right_motor | 右モータ角度の現在値 |
MotorAngle.cpp の 72 行目に定義があります。
| float MotorAngle::relativeAngleMean | ( | std::int32_t | current_left_motor, |
| std::int32_t | current_right_motor | ||
| ) |
左右モータの相対角度の平均値を計算する
左モータと右モータの相対角度の平均値を計算する
[MotorAngle::relativeAngleMean]
| current_left_motor | 左モータ角度の現在値 |
| current_right_motor | 右モータ角度の現在値 |
MotorAngle.cpp の 51 行目に定義があります。

| void MotorAngle::reset | ( | void | ) |
| void MotorAngle::update | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
左右モータ角度の過去値を現在値へ更新する
MotorAngleメンバ変数のpre_left_motorとpre_right_motorの値を現在値に更新する
| left_motor | 左モータ角度の現在値 |
| right_motor | 右モータ角度の現在値 |
MotorAngle.cpp の 14 行目に定義があります。
|
inline |
SelfLocalization.h の 36 行目に定義があります。
| std::int32_t MotorAngle::current_angle |
SelfLocalization.h の 24 行目に定義があります。
| float MotorAngle::moving_distance |
SelfLocalization.h の 27 行目に定義があります。
| std::int32_t MotorAngle::old_angle |
SelfLocalization.h の 25 行目に定義があります。
| std::int32_t MotorAngle::rotation_angle |
SelfLocalization.h の 26 行目に定義があります。
| float MotorAngle::wheel_across |
SelfLocalization.h の 28 行目に定義があります。
 1.8.6
1.8.6