|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
PID制御の計算を行うクラス [詳解]
#include "Pid.h"
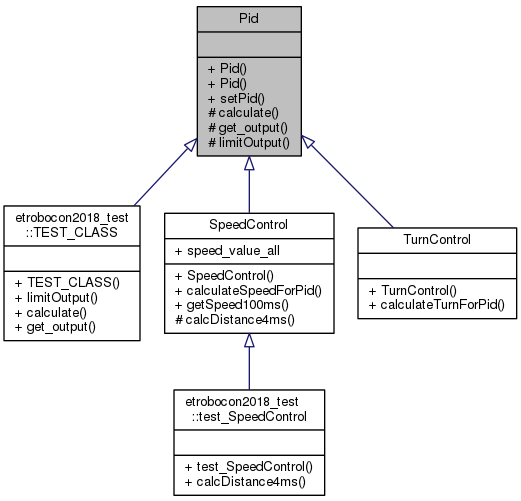
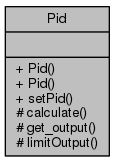
公開メンバ関数 | |
| Pid (double p_gain_, double i_gain_, double d_gain_, double target_) | |
| Pid (double p_gain_, double i_gain_, double d_gain_, double diff_, double integral_, double target_, double output_) | |
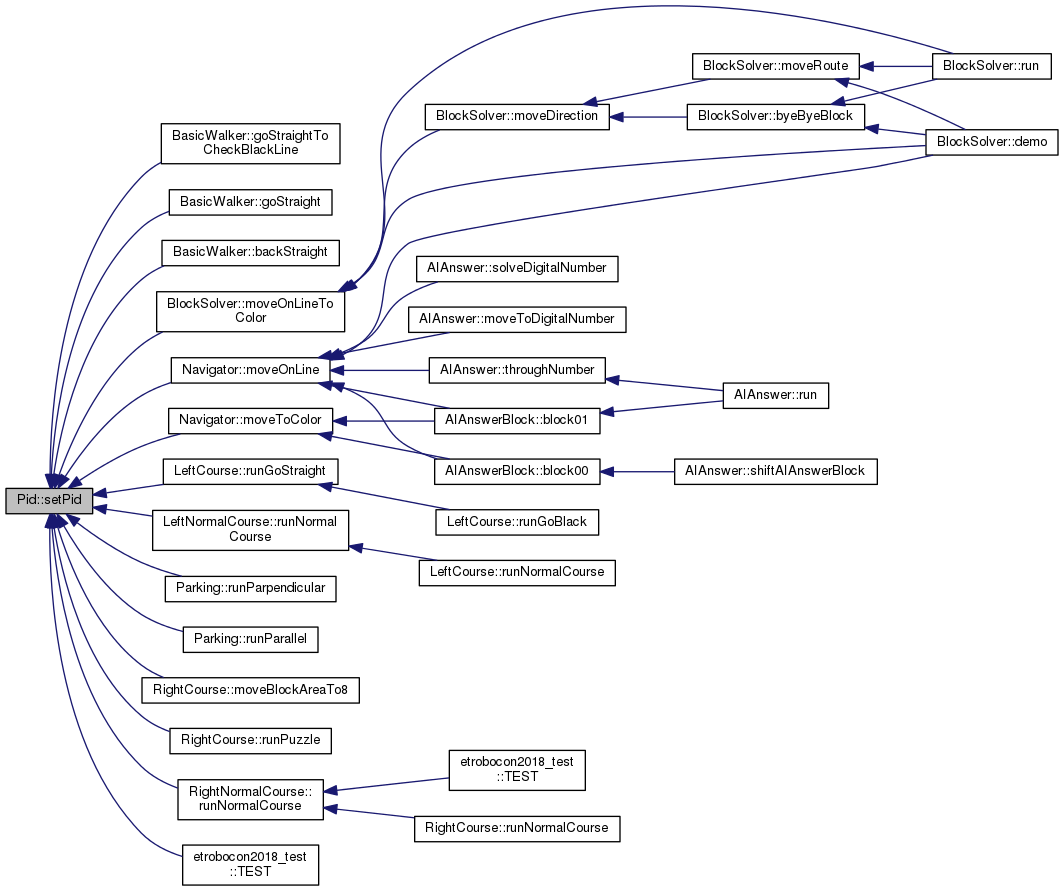
| void | setPid (double p_gain_, double i_gain_, double d_gain_, double target_) |
限定公開メンバ関数 | |
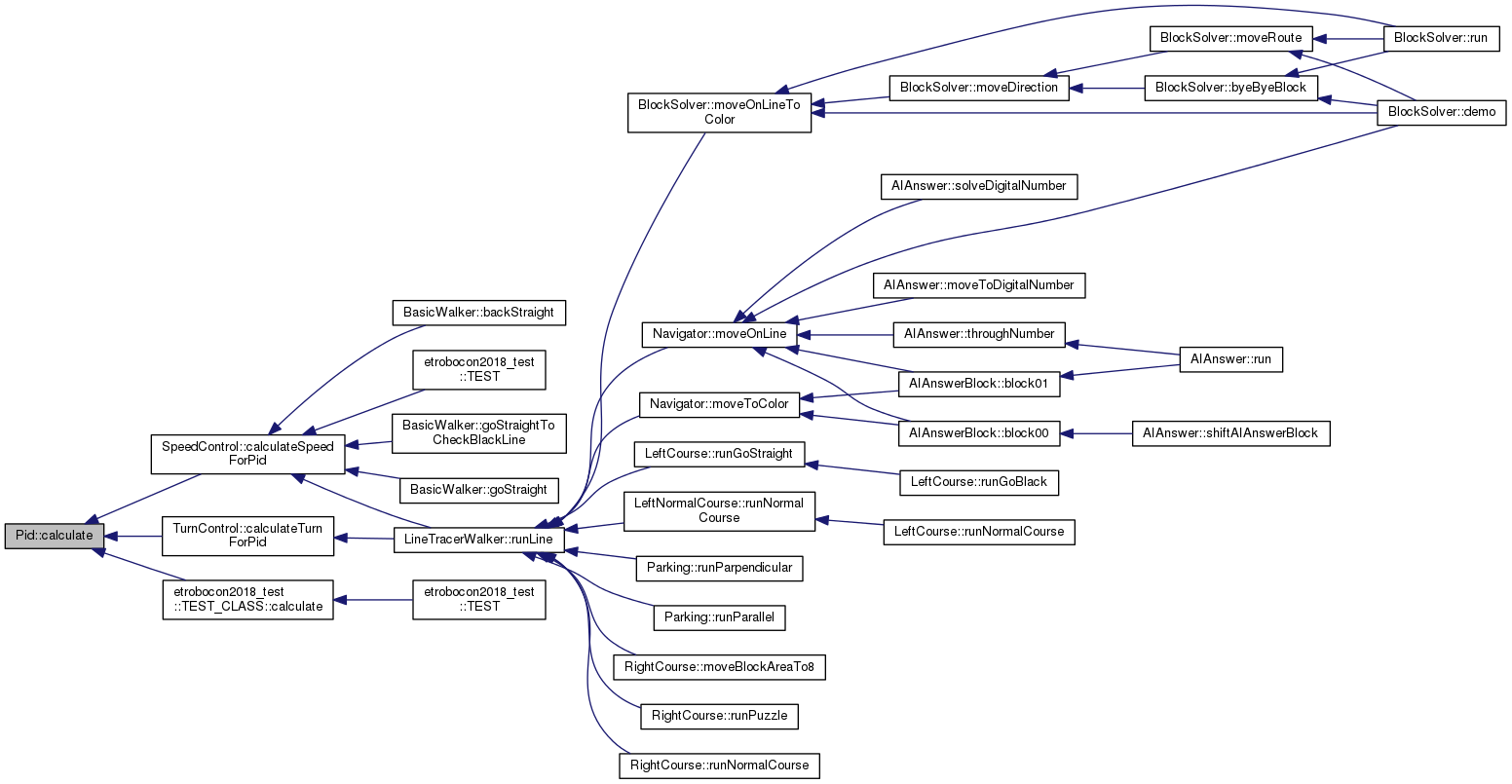
| void | calculate (double light_value) |
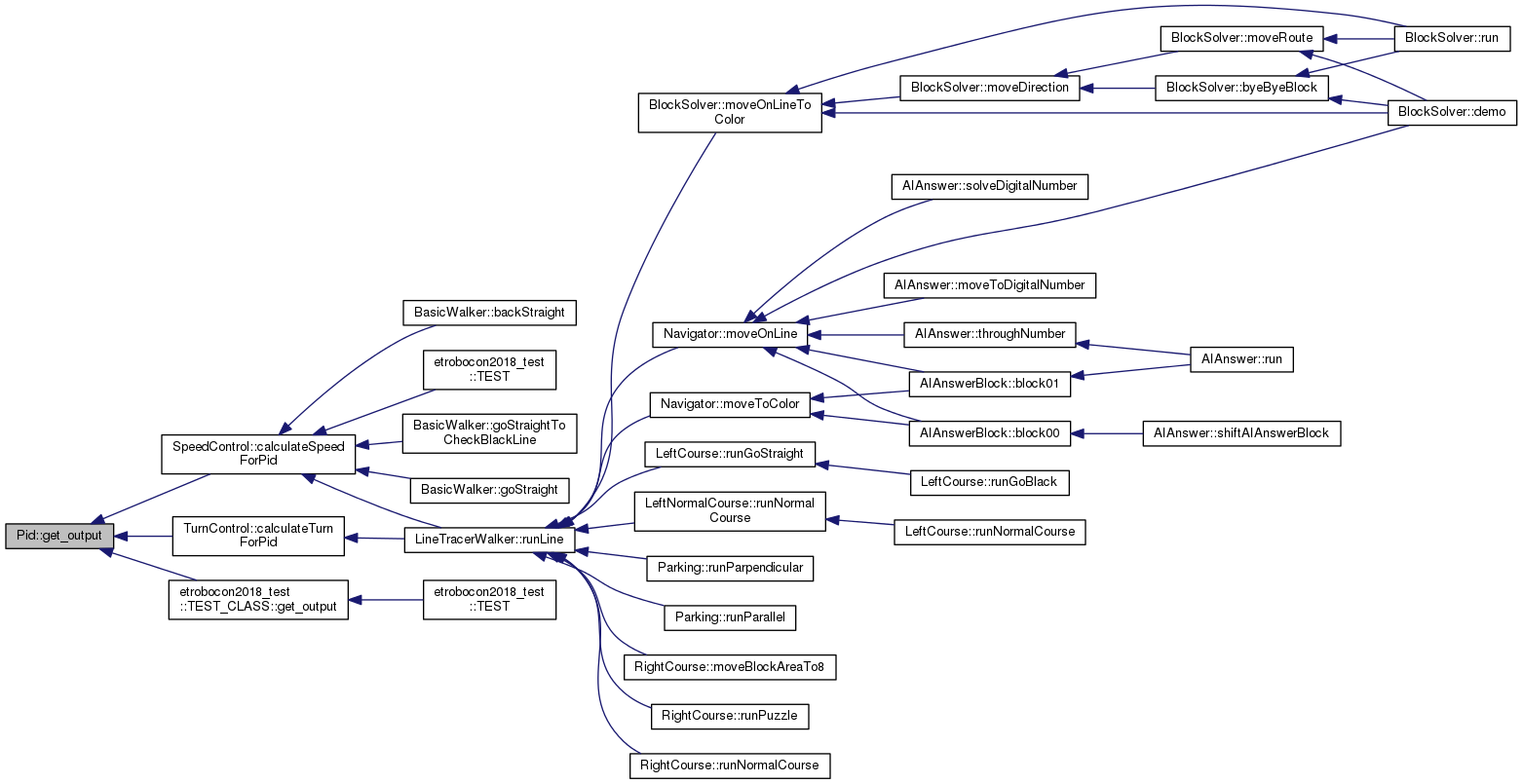
| double | get_output () |
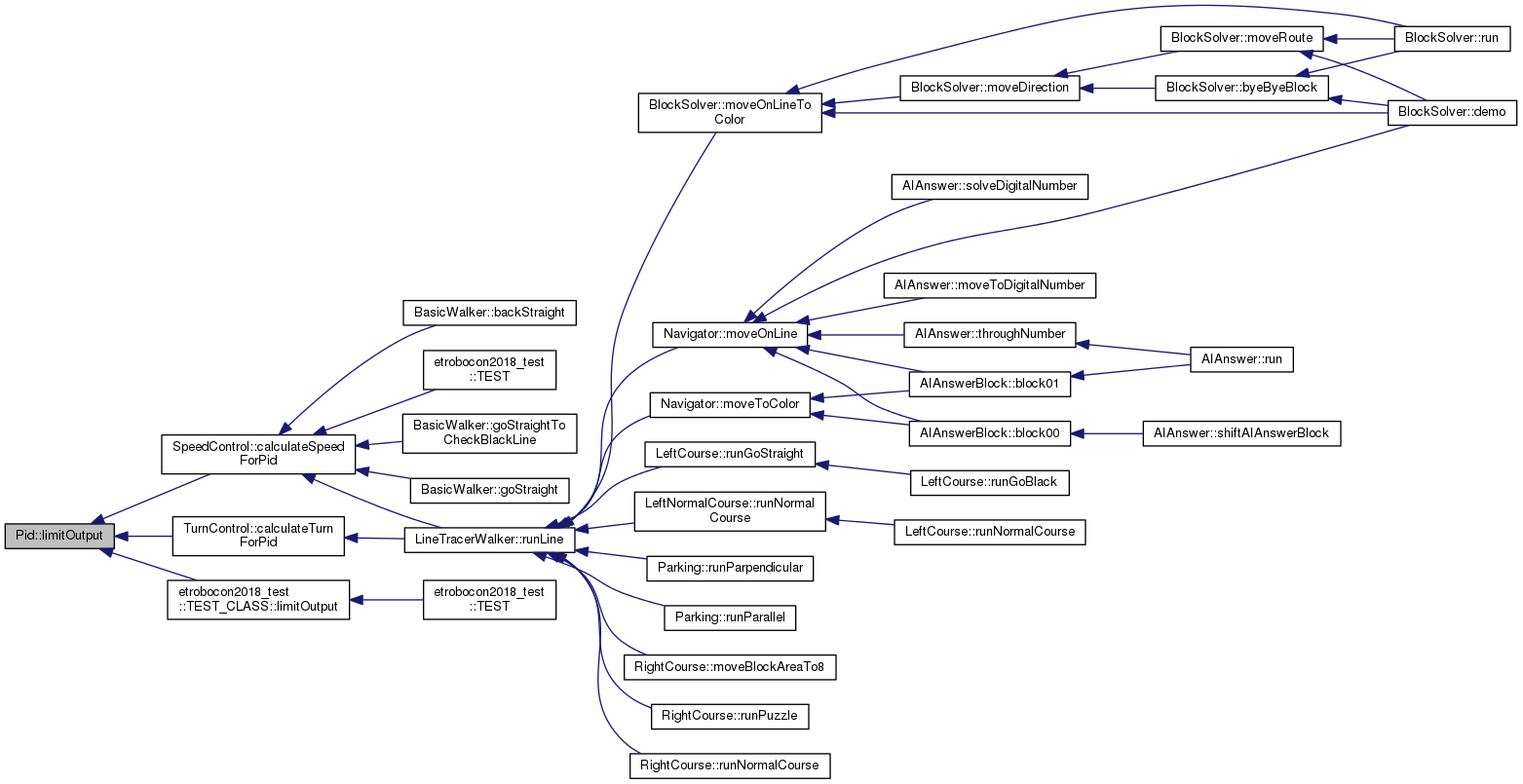
| double | limitOutput (double pid_value) |
| Pid::Pid | ( | double | p_gain_, |
| double | i_gain_, | ||
| double | d_gain_, | ||
| double | target_ | ||
| ) |
| Pid::Pid | ( | double | p_gain_, |
| double | i_gain_, | ||
| double | d_gain_, | ||
| double | diff_, | ||
| double | integral_, | ||
| double | target_, | ||
| double | output_ | ||
| ) |
|
protected |
PID制御の計算をする
| light_value | 現在の値 |
|
protected |
|
protected |
| void Pid::setPid | ( | double | p_gain_, |
| double | i_gain_, | ||
| double | d_gain_, | ||
| double | target_ | ||
| ) |
Kp, Ki, Kd, 目標値を設定する
| _p_gain | Kp |
| _i_gain | Ki |
| _d_gain | Kd |
| _target | 目標値 |

 1.8.6
1.8.6