LPF(Low-Pass Filter)をまとめたクラス
[詳解]
#include <LPF.h>
|
| | LPF () |
| |
| float | sensor (std::int32_t current_sensor) |
| | 現在のセンサ値にフィルタ処理を実行する [詳解]
|
| |
| float | RCFilter (std::int32_t current_sensor) |
| | RCフィルタ(ローパスフィルタ)処理 [詳解]
|
| |
LPF(Low-Pass Filter)をまとめたクラス
LPF.h の 14 行目に定義があります。
| float LPF::RCFilter |
( |
std::int32_t |
current_sensor | ) |
|
RCフィルタ(ローパスフィルタ)処理
[LPF::RCFilter]
- 引数
-
- 戻り値
- フィルタ処理を実行したセンサ値
LPF.cpp の 27 行目に定義があります。
30 constexpr
double coefficient = 0.9;
31 auto filtered = coefficient *
pre_sensor + (1 - coefficient) * current_sensor;
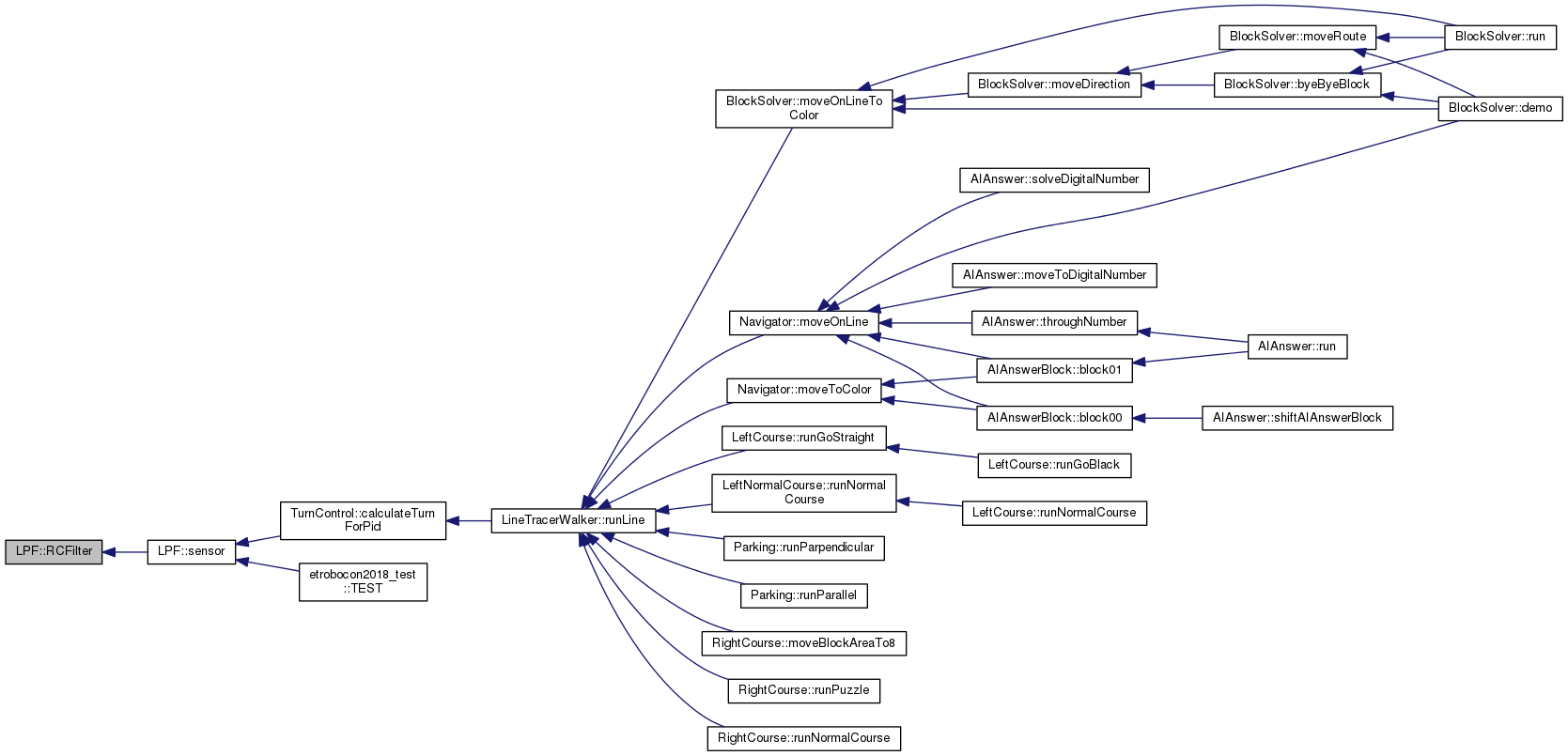
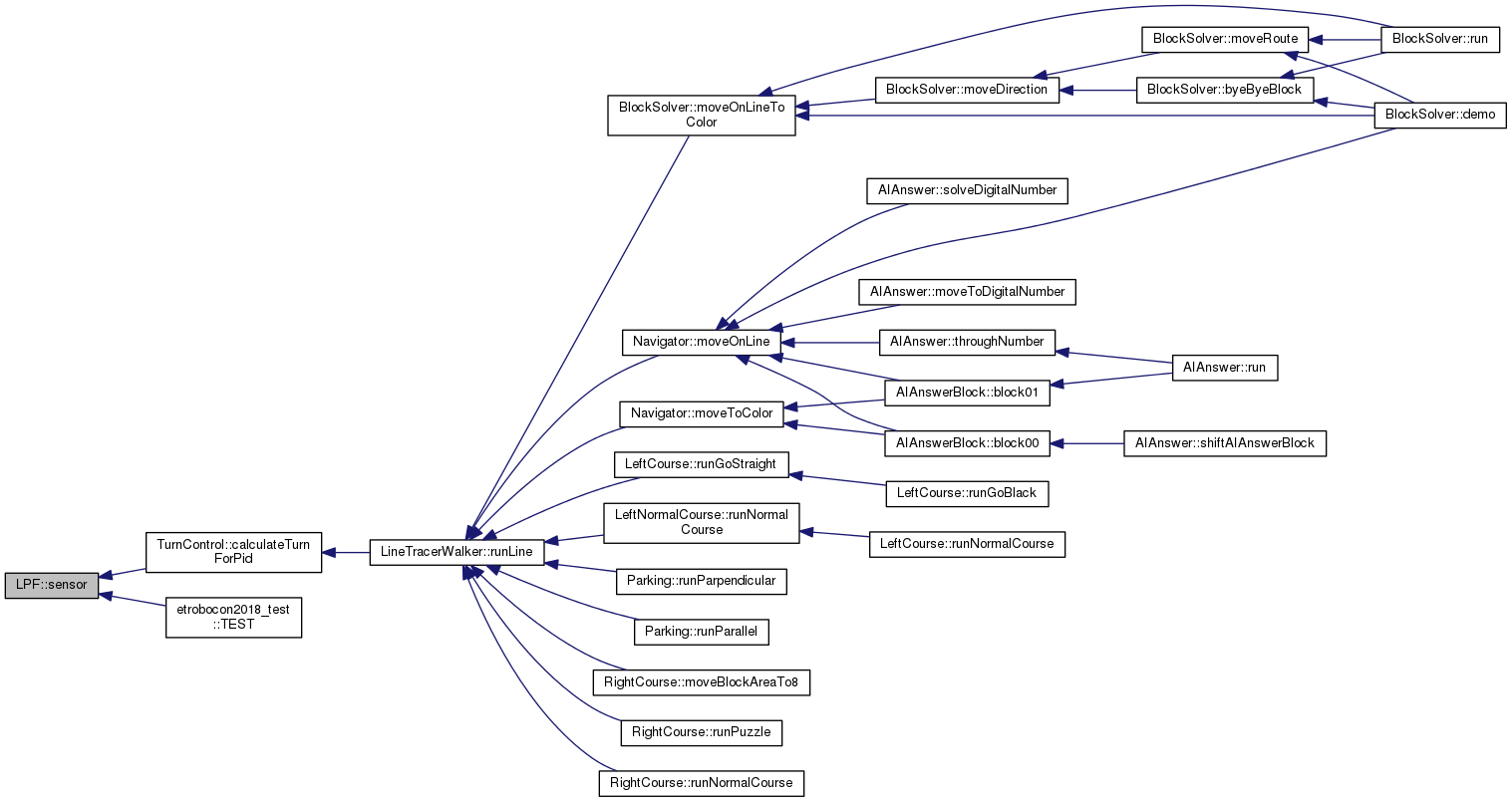
| float LPF::sensor |
( |
std::int32_t |
current_sensor | ) |
|
現在のセンサ値にフィルタ処理を実行する
[LPF::sensor]
- 引数
-
- 戻り値
- フィルタ処理を実行したセンサ値
LPF.cpp の 9 行目に定義があります。
14 return static_cast<double>(current_sensor);
float RCFilter(std::int32_t current_sensor)
RCフィルタ(ローパスフィルタ)処理
| std::int32_t LPF::pre_sensor |
このクラス詳解は次のファイルから抽出されました:

 1.8.6
1.8.6

