|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <LineTracerWalker.h>
公開メンバ関数 | |
| LineTracerWalker () | |
| void | runLine (int32_t countL, int32_t countR, int16_t light_value) |
| void | setForward (int8_t setValue) |
| void | setTurn (int8_t setValue) |
| int8_t | getForward () |
| int8_t | getTurn () |
| void | isLeftsideLine (bool b) |
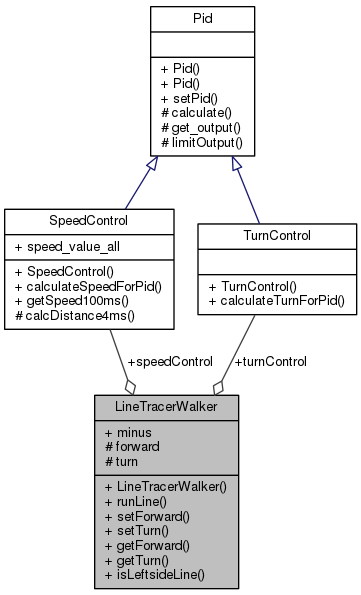
公開変数類 | |
| TurnControl | turnControl |
| SpeedControl | speedControl |
| int8_t | minus |
限定公開変数類 | |
| int8_t | forward |
| int8_t | turn |
int main(){ lineTracerWalker.speedControl.setPid(6.0, 1.0, 0.5, 110.0); lineTracerWalker.turnControl.setPid(3.0, 1.0, 1.5, target_brightness); while(1){ auto luminance = controller.getBrightness(); lineTracerWalker.runLine(walker.get_count_L(), walker.get_count_R(), luminance); walker.run(lineTracerWalker.getForward(), lineTracerWalker.getTurn());
controller.tlspTsk(4); } }
LineTracerWalker.h の 21 行目に定義があります。
| LineTracerWalker::LineTracerWalker | ( | ) |
LineTracerWalker.cpp の 3 行目に定義があります。
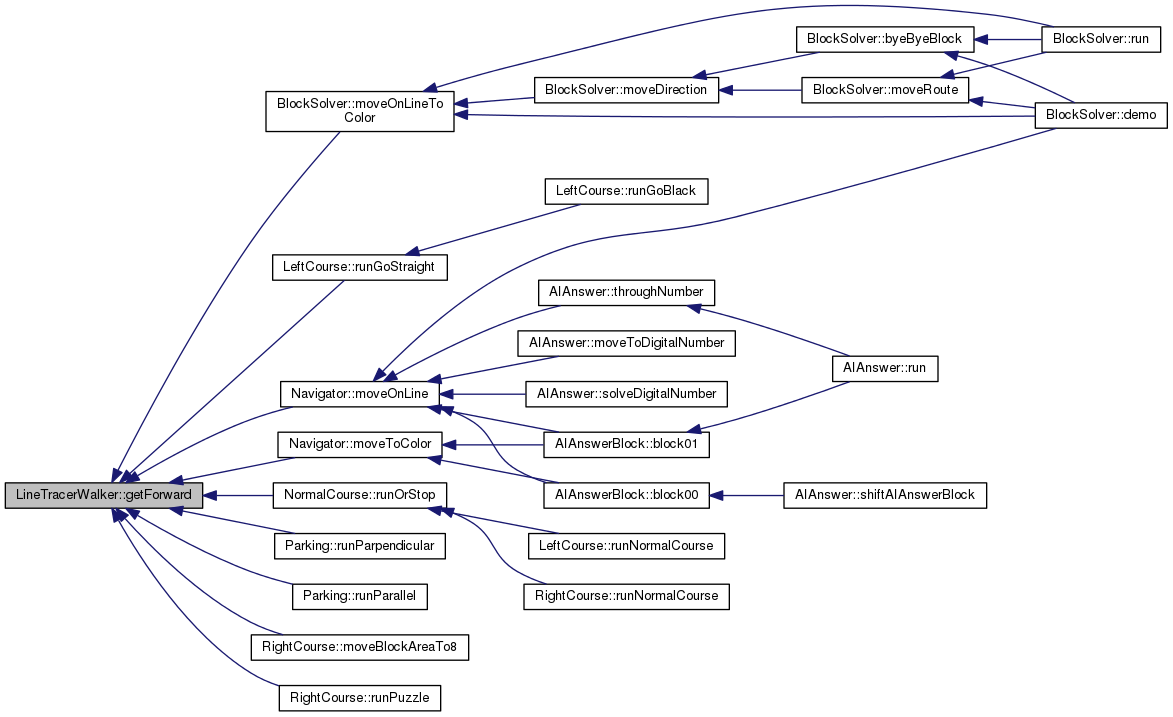
| int8_t LineTracerWalker::getForward | ( | ) |
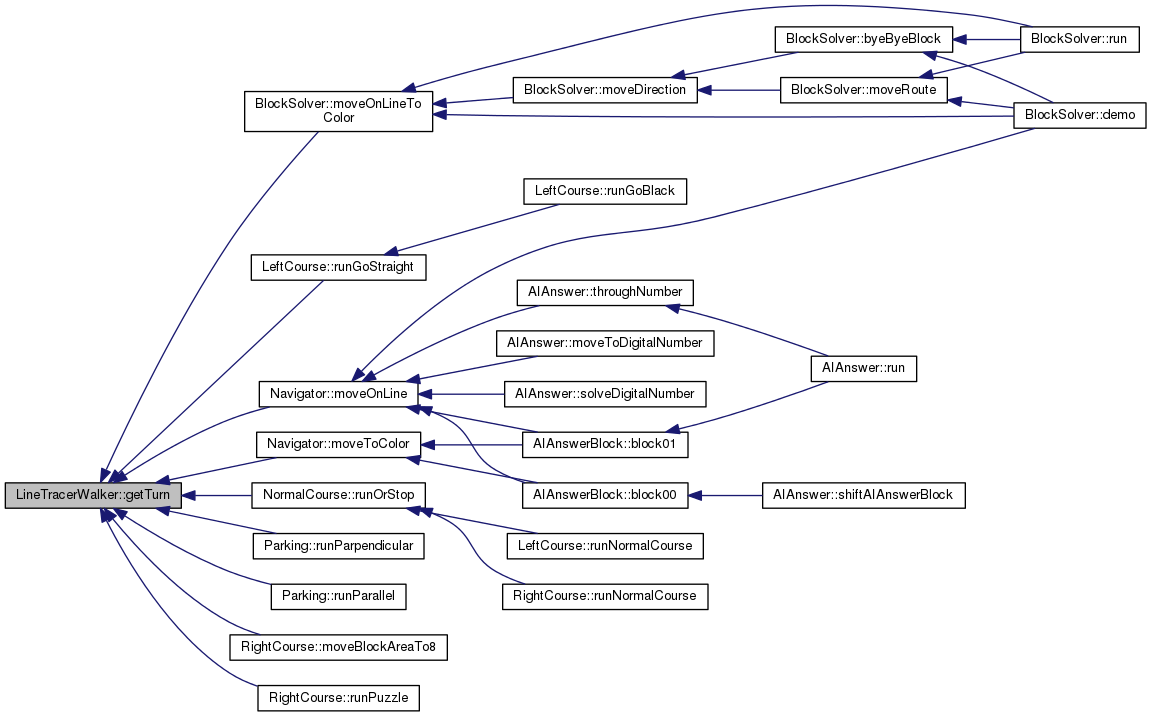
| int8_t LineTracerWalker::getTurn | ( | ) |
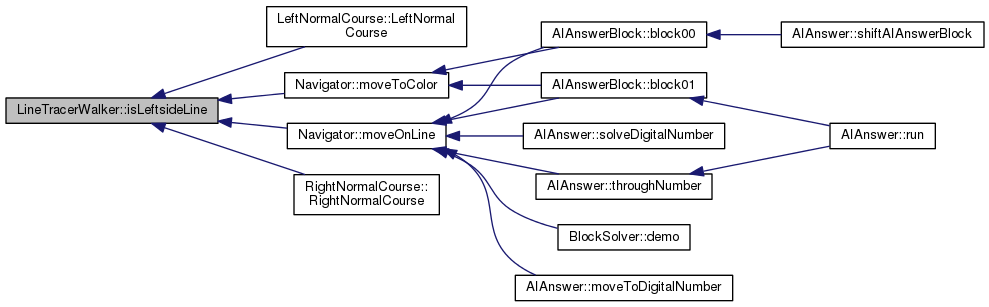
| void LineTracerWalker::isLeftsideLine | ( | bool | b | ) |
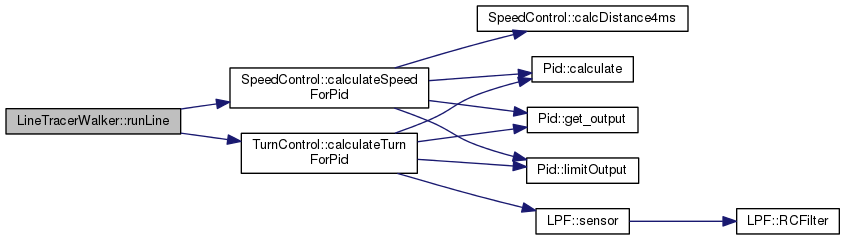
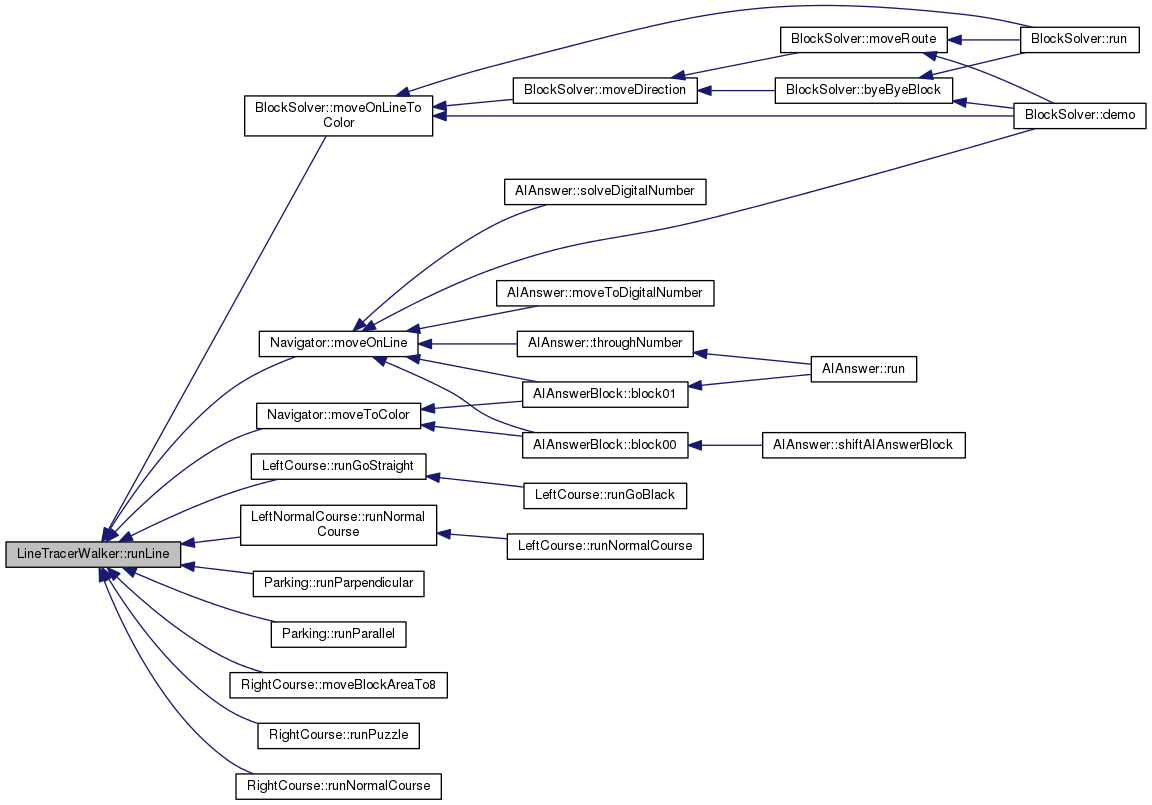
| void LineTracerWalker::runLine | ( | int32_t | countL, |
| int32_t | countR, | ||
| int16_t | light_value | ||
| ) |
LineTracerWalker.cpp の 5 行目に定義があります。
| void LineTracerWalker::setForward | ( | int8_t | setValue | ) |
| void LineTracerWalker::setTurn | ( | int8_t | setValue | ) |
LineTracerWalker.cpp の 16 行目に定義があります。
|
protected |
LineTracerWalker.h の 35 行目に定義があります。
| int8_t LineTracerWalker::minus |
LineTracerWalker.h の 32 行目に定義があります。
| SpeedControl LineTracerWalker::speedControl |
LineTracerWalker.h の 31 行目に定義があります。
|
protected |
LineTracerWalker.h の 36 行目に定義があります。
| TurnControl LineTracerWalker::turnControl |
LineTracerWalker.h の 30 行目に定義があります。
 1.8.6
1.8.6