#include <NormalCourse.h>
NormalCourse 連携図
公開メンバ関数 | |
| NormalCourse (Controller &controller_, bool isLeftCourse_, int targetBrightness_) | |
| void | setIsLeftCourse (bool isLeftCourse_) |
| void | runNormalCourse () |
| bool | getIsLeftCourse () const |
| int | getTargetBrightness () const |
詳解
NormalCourse.h の 12 行目に定義があります。
構築子と解体子
◆ NormalCourse()
| NormalCourse::NormalCourse | ( | Controller & | controller_, |
| bool | isLeftCourse_, | ||
| int | targetBrightness_ | ||
| ) |
コンストラクタ
- 引数
-
controller [コントローラのインスタンス] isLeftCourse_ [エッジがどっちかtrueがLeftコース] targetBrightness_ [カラーセンサーの目標値]
NormalCourse.cpp の 13 行目に定義があります。
関数詳解
◆ getIsLeftCourse()
| bool NormalCourse::getIsLeftCourse | ( | ) | const |
◆ getTargetBrightness()
| int NormalCourse::getTargetBrightness | ( | ) | const |
targetBrightness(カラーセンサの目標値)を返すゲッター
NormalCourse.cpp の 69 行目に定義があります。
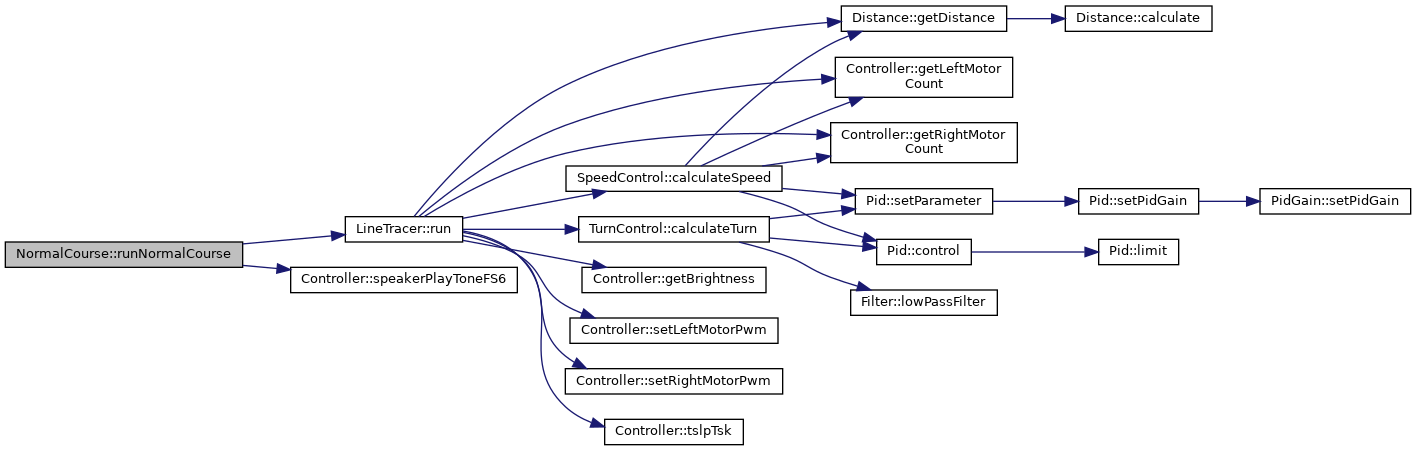
◆ runNormalCourse()
| void NormalCourse::runNormalCourse | ( | ) |
実際にNormalコースを走る.
実際にNormalコースを走る. ここにパラメータを頑張って書く.
詳しく見たいならLineTracer.hを見てね. 進む距離,目標スピード,スピードpid,ターンpid
NormalCourse.cpp の 31 行目に定義があります。
static void speakerPlayToneFS6(int duration)
Definition: Controller.cpp:21
Definition: LineTracer.h:26
呼び出し関係図:
被呼び出し関係図:

◆ setIsLeftCourse()
| void NormalCourse::setIsLeftCourse | ( | bool | isLeftCourse_ | ) |
このクラス詳解は次のファイルから抽出されました:
- src/module/NormalCourse.h
- src/module/NormalCourse.cpp
