#include <LineTracer.h>
LineTracer 連携図
公開メンバ関数 | |
| LineTracer (Controller &controller_, int targetBrightness_, bool isLeftCourse_) | |
| void | run (NormalCourseProperty &settings) |
| 走行距離や目標スピード、スピード制御PID、回転制御PIDを NormalCourseProperty 構造体を使用し渡す。 [詳解] | |
| void | setTargetBrightness (int targetBrightness_) |
| カラーセンサーの目標値を再設定する [詳解] | |
詳解
LineTracer.h の 26 行目に定義があります。
構築子と解体子
◆ LineTracer()
| LineTracer::LineTracer | ( | Controller & | controller_, |
| int | targetBrightness_, | ||
| bool | isLeftCourse_ | ||
| ) |
コンストラクタ
- 引数
-
controller_ [Controller] targetBrightness_ [カラーセンサーの目標値] isLeftCourse_ [Leftコースである場合True]
LineTracer.cpp の 10 行目に定義があります。
関数詳解
◆ run()
| void LineTracer::run | ( | NormalCourseProperty & | settings | ) |
走行距離や目標スピード、スピード制御PID、回転制御PIDを NormalCourseProperty 構造体を使用し渡す。
指定された距離だけ走行する。
- 引数
-
settings [各種パラメータが入っている NormalCourseProperty 構造体]
LineTracer.cpp の 22 行目に定義があります。
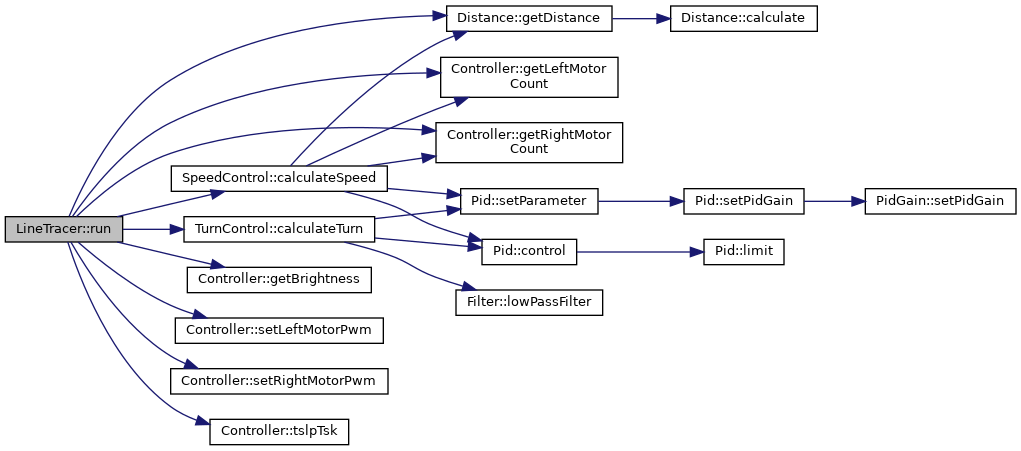
double calculateSpeed(int targetSpeed, double Kp, double Ki, double Kd)
Definition: SpeedControl.cpp:21
double calculateTurn(int forward, int currentBrightness, int targetBrightness, double Kp, double Ki, double Kd)
旋回値を計算する関数
Definition: TurnControl.cpp:30
呼び出し関係図:
被呼び出し関係図:

◆ setTargetBrightness()
| void LineTracer::setTargetBrightness | ( | int | targetBrightness_ | ) |
このクラス詳解は次のファイルから抽出されました:
- src/module/LineTracer.h
- src/module/LineTracer.cpp
