|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
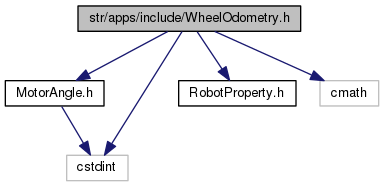
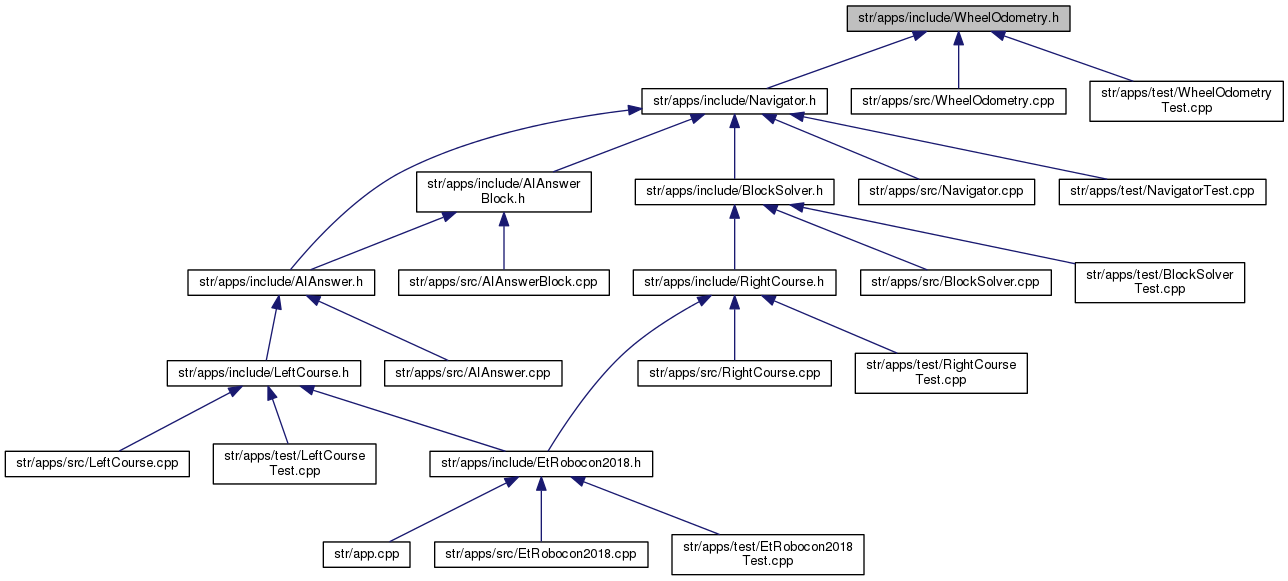
オドメトリ(Wheel odometry)手法を用いた速度/角度/自己位置推定 [詳解]
クラス | |
| struct | Coordinate |
| 走行体の位置情報をまとめた構造体 [詳解] | |
| class | WheelOdometry |
オドメトリ(Wheel odometry)手法を用いた速度/角度/自己位置推定
WheelOdometry.h に定義があります。
 1.8.6
1.8.6

