|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <WheelOdometry.h>
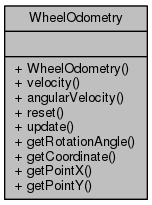
公開メンバ関数 | |
| WheelOdometry (float diameter=99.0, float tread=147.5, float cycle=0.04) | |
| float | velocity (std::int32_t left_motor, std::int32_t right_motor) |
| 走行体の旋回速度を求める [詳解] | |
| float | angularVelocity (std::int32_t left_motor, std::int32_t right_motor) |
| 走行体の旋回角速度を求める [詳解] | |
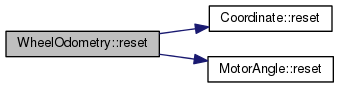
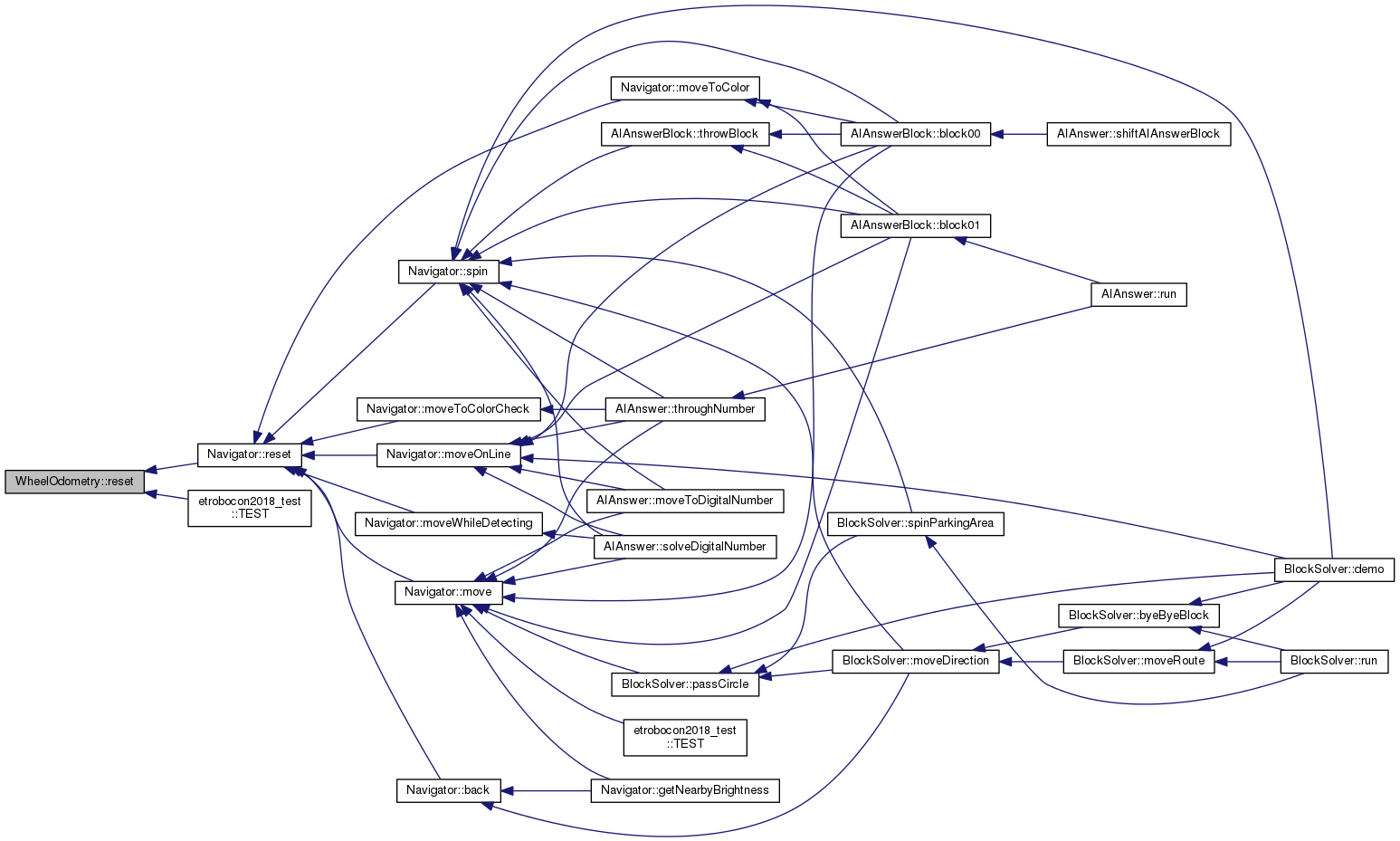
| const Coordinate & | reset () |
| 走行体の位置情報を初期化する [詳解] | |
| const Coordinate & | update (std::int32_t left_motor, std::int32_t right_motor) |
| 走行体の位置情報を更新する [詳解] | |
| float | getRotationAngle (std::int32_t left_motor, std::int32_t right_motor) |
| 走行体の回転角度を返す [詳解] | |
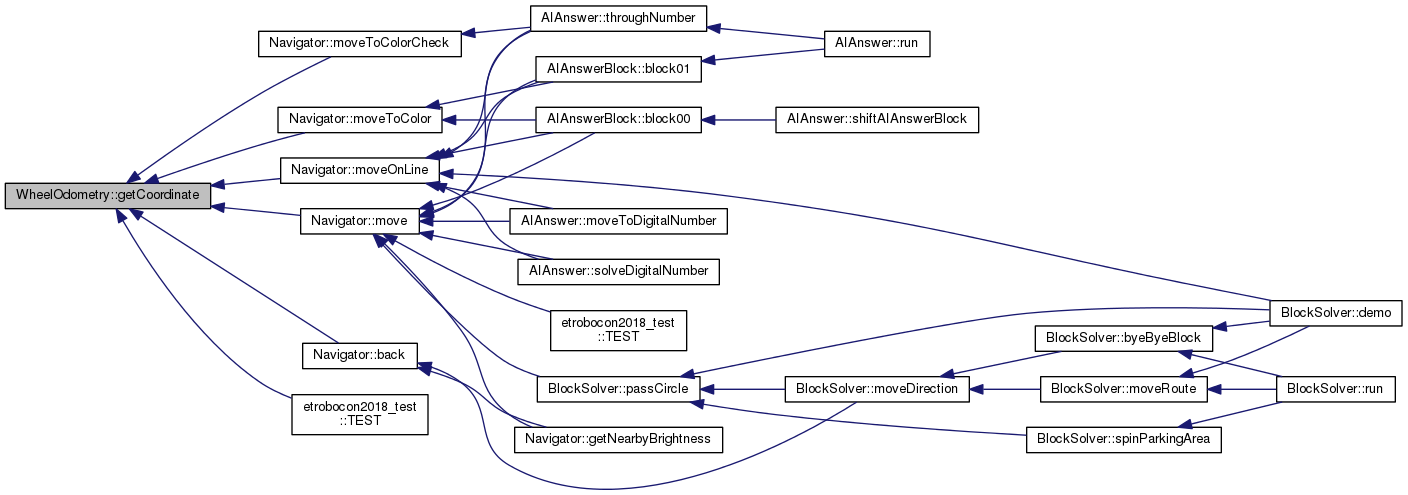
| const Coordinate & | getCoordinate () |
| 走行体の位置情報を返す [詳解] | |
| float | getPointX () |
| 走行体の位置x座標を返す [詳解] | |
| float | getPointY () |
| 走行体の位置y座標を返す [詳解] | |
WheelOdometry.h の 28 行目に定義があります。
|
inline |
WheelOdometry.h の 35 行目に定義があります。
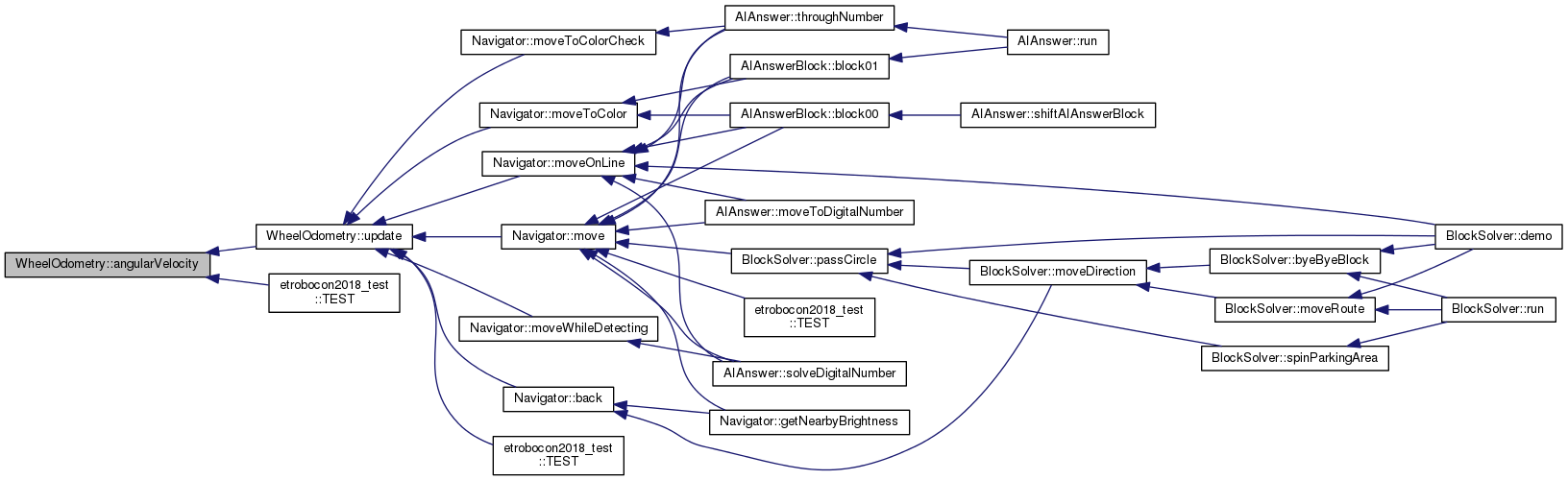
| float WheelOdometry::angularVelocity | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
走行体の旋回角速度を求める
左右モータの回転角から走行体の角速度を求める
[WheelOdometry::angularVelocity]
| left_motor | 左モータの回転角 |
| right_motor | 右モータの回転角 |
WheelOdometry.cpp の 60 行目に定義があります。

| const Coordinate & WheelOdometry::getCoordinate | ( | ) |
| float WheelOdometry::getPointX | ( | ) |
| float WheelOdometry::getPointY | ( | ) |
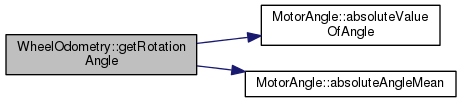
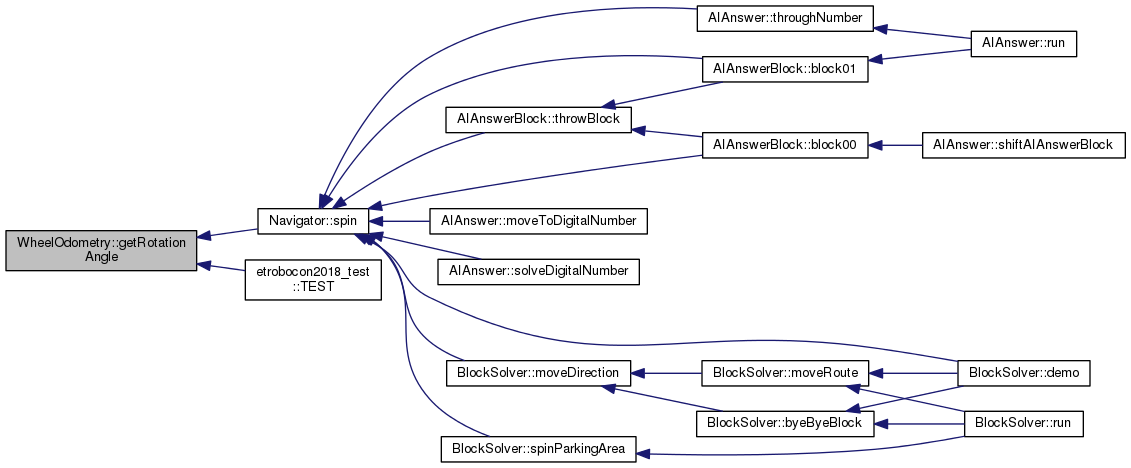
| float WheelOdometry::getRotationAngle | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
走行体の回転角度を返す
[WheelOdometry::getRotationAngle]
| left_motor | 左モータの回転角 |
| right_motor | 右モータの回転角 |
WheelOdometry.cpp の 107 行目に定義があります。
| const Coordinate & WheelOdometry::reset | ( | void | ) |
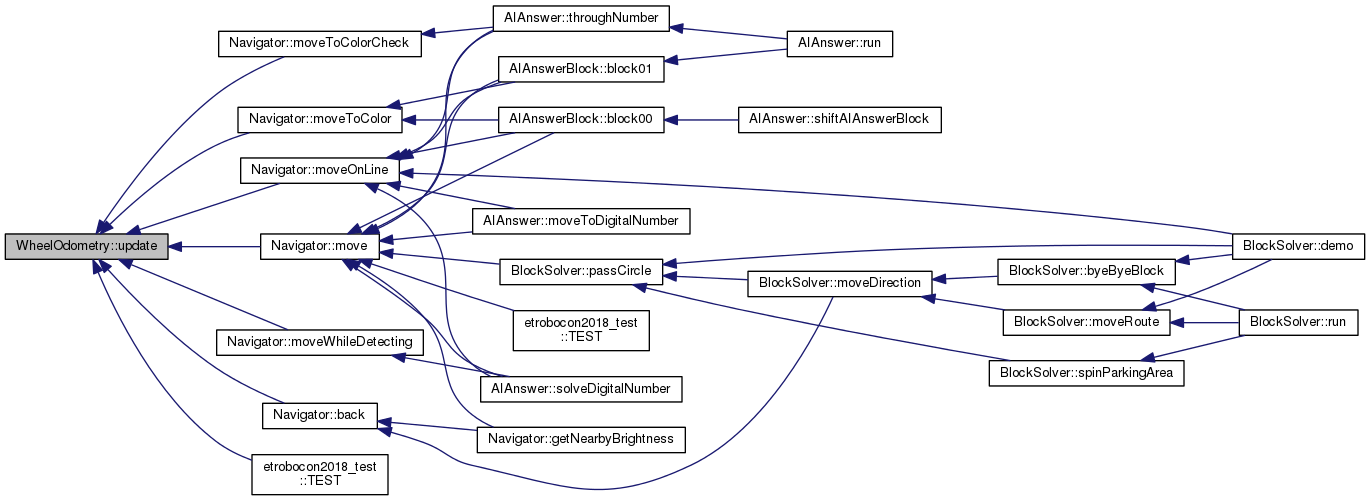
| const Coordinate & WheelOdometry::update | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
走行体の位置情報を更新する
| left_motor | 左モータの回転角 |
| right_motor | 右モータの回転角 |
WheelOdometry.cpp の 89 行目に定義があります。

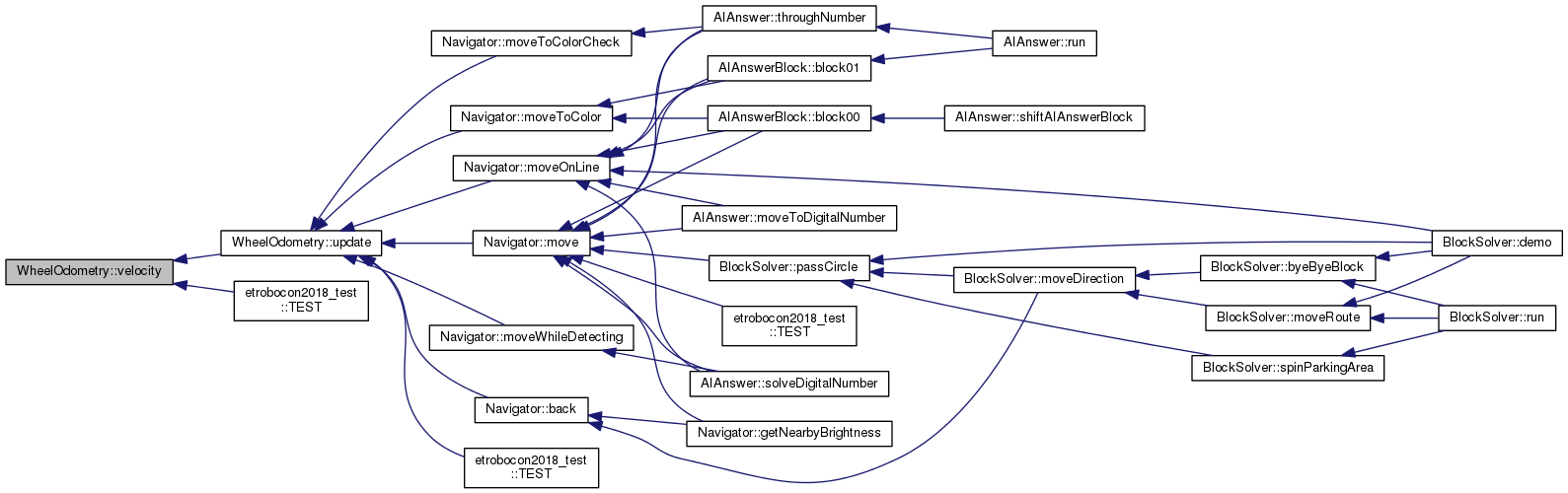
| float WheelOdometry::velocity | ( | std::int32_t | left_motor, |
| std::int32_t | right_motor | ||
| ) |
走行体の旋回速度を求める
左右モータの回転角から走行体の速度を算出する
| left_motor | 左モータの回転角 |
| right_motor | 右モータの回転角 |
WheelOdometry.cpp の 43 行目に定義があります。

 1.8.6
1.8.6