|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
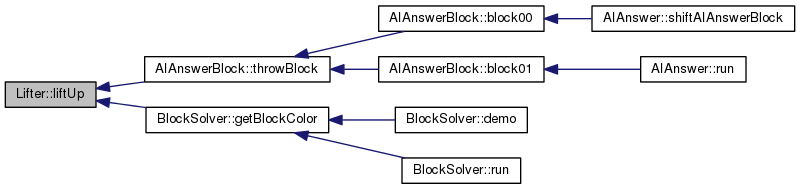
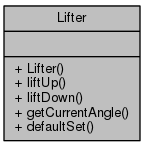
走行体のアームを操作するクラス。 [詳解]
#include "Lifter.h"
公開メンバ関数 | |
| Lifter (Controller &controller_) | |
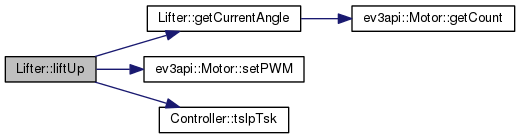
| void | liftUp (std::uint8_t angle, std::int8_t pwm=20) |
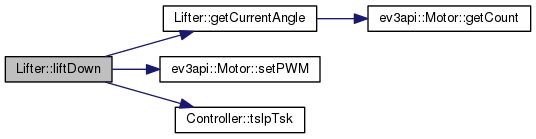
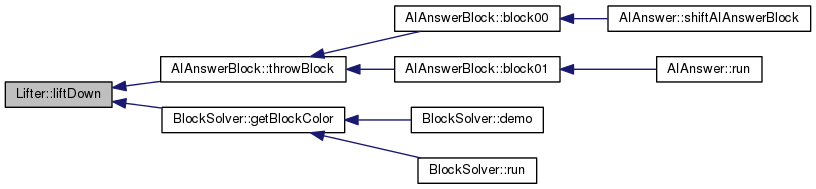
| void | liftDown (std::uint8_t angle, std::int8_t pwm=20) |
| std::int8_t | getCurrentAngle () |
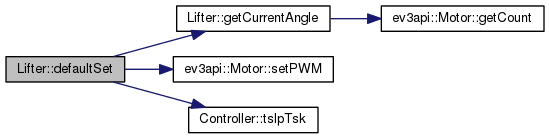
| void | defaultSet (std::int8_t pwm=20) |
フレンド | |
| class | etrobocon2018_test::LifterTest |
|
inlineexplicit |
| void Lifter::defaultSet | ( | std::int8_t | pwm = 20 | ) |
| std::int8_t Lifter::getCurrentAngle | ( | ) |
| void Lifter::liftDown | ( | std::uint8_t | angle, |
| std::int8_t | pwm = 20 |
||
| ) |
| void Lifter::liftUp | ( | std::uint8_t | angle, |
| std::int8_t | pwm = 20 |
||
| ) |
|
friend |
 1.8.6
1.8.6