|
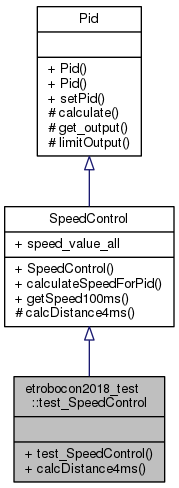
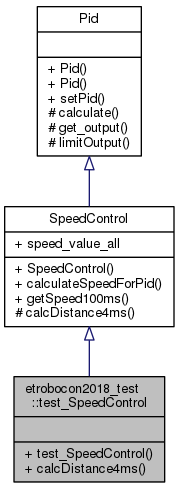
| | test_SpeedControl () |
| |
| int | calcDistance4ms (int curAngleL, int curAngleR) |
| |
| | SpeedControl () |
| |
| std::int32_t | calculateSpeedForPid (std::int32_t curAngleL, std::int32_t curAngleR) |
| |
| std::int16_t | getSpeed100ms () |
| |
| | Pid (double p_gain_, double i_gain_, double d_gain_, double target_) |
| |
| | Pid (double p_gain_, double i_gain_, double d_gain_, double diff_, double integral_, double target_, double output_) |
| |
| void | setPid (double p_gain_, double i_gain_, double d_gain_, double target_) |
| |
| etrobocon2018_test::test_SpeedControl::test_SpeedControl |
( |
| ) |
|
|
inline |
| int etrobocon2018_test::test_SpeedControl::calcDistance4ms |
( |
int |
curAngleL, |
|
|
int |
curAngleR |
|
) |
| |
|
inline |
SpeedControlTest.cpp の 48 行目に定義があります。
std::int8_t calcDistance4ms(std::int32_t curAngleL, std::int32_t curAngleR)
このクラス詳解は次のファイルから抽出されました:
 基底クラス SpeedControl に属する継承公開メンバ関数
基底クラス SpeedControl に属する継承公開メンバ関数

 1.8.6
1.8.6

