|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
クラス | |
| class | BlockStrategyTest |
| class | DistinguisherTest |
| class | LeftCourseTest |
| class | LifterTest |
| class | LineTracerWalkerTest |
| class | NormalCourseTest |
| class | TEST_CLASS |
| class | RightCourseTest |
| class | test_SpeedControl |
| class | UserInterfaceTest |
関数 | |
| TEST (AIAnswerArrayTest, construct) | |
| TEST (AIAnswerArrayTest, constructSpecifiedSize) | |
| TEST (AIAnswerArrayTest, constructSpecifiedType) | |
| TEST (AIAnswerArrayTest, sizeTest) | |
| TEST (AIAnswerArrayTest, positionTest) | |
| TEST (AIAnswerArrayTest, atTest) | |
| TEST (AIAnswerArrayTest, atTestDouble) | |
| TEST (AIAnswerArrayTest, operatorTest) | |
| TEST (AIAnswerArrayTest, castTest) | |
| TEST (AIAnswerArrayTest, probsTest) | |
| TEST (AIAnswerArrayTest, handwritingTest) | |
| TEST (ColorBlockTest, createColorBlock) | |
| TEST (ColorBlockPlaceTest, createColorBlockPlace) | |
| TEST (ColorBlockPlaceTest, setColorBlock) | |
| TEST (ColorBlockPlaceTest, connectColorBlockPlace) | |
| TEST (ColorBlockPlaceTest, dynamicCreateColorBlockPlace) | |
| TEST (BlockSolverTest, getChangeDirection) | |
| TEST (BlockSolverTest, move) | |
| TEST (BlockSolverTest, move2) | |
| TEST (BlockSolverTest, runrun) | |
| TEST_F (BlockStrategyTest, createColorBlockPlace) | |
| TEST_F (BlockStrategyTest, connectColorBlockPlace) | |
| TEST_F (BlockStrategyTest, putColorBlockPlace) | |
| TEST_F (BlockStrategyTest, getDirection) | |
| TEST (DistanceTest, getDistanceTotalTest1) | |
| TEST (DistanceTest, getDistanceCurrentTest1) | |
| TEST (DistanceTest, getDistanceCurrentTest2) | |
| TEST_F (DistinguisherTest, getColorWhiteTest2) | |
| TEST_F (DistinguisherTest, getColorBlackTest1) | |
| TEST_F (DistinguisherTest, getColorBlackTest2) | |
| TEST (EtRobocon2018Test, CreateTest) | |
| TEST (ExplorerTest, getInitialValueOfBlockAreaNodeListTest) | |
| TEST (ExplorerTest, getValueOfBlockAreaNodeListTest) | |
| TEST (ExplorerTest, checkNodeHadBlockTest) | |
| TEST (ExplorerTest, searchRouteFrom0To1Test) | |
| TEST (ExplorerTest, searchRouteFrom1To0Test) | |
| TEST (ExplorerTest, searchRouteFrom8To9Test) | |
| TEST (ExplorerTest, searchRouteFrom11To10Test) | |
| TEST (ExplorerTest, searchRouteFrom0To2Test) | |
| TEST (ExplorerTest, searchRouteFrom2To0Test) | |
| TEST (ExplorerTest, searchShortestRouteFrom11To5Test) | |
| TEST (ExplorerTest, searchRouteFrom11To5Circumventing6Test) | |
| TEST (ExplorerTest, searchRouteFrom11To5Circumventing6And10Test) | |
| TEST (ExplorerTest, searchRouteFrom13To6Circumventing10Test) | |
| TEST (ExplorerTest, searchRouteFrom11To5Circumventing6And9And10Test) | |
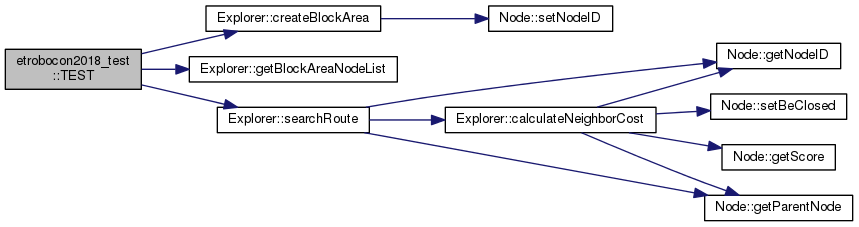
| TEST (ExplorerTest, searchRouteInSenarioTest) | |
| TEST (FirstCodeTest, get0WhenNoneUpAndDownAnyDigit) | |
| TEST (FirstCodeTest, get10000WhenOnceUp5thDigit) | |
| TEST (FirstCodeTest, get1000WhenOnceUp4thDigit) | |
| TEST (FirstCodeTest, get100WhenOnceUp3rdDigit) | |
| TEST (FirstCodeTest, get10WhenOnceUp2ndDigit) | |
| TEST (FirstCodeTest, get1WhenOnceUp1stDigit) | |
| TEST (FirstCodeTest, get0When10thUp5thDigit) | |
| TEST (FirstCodeTest, get0WhenOnceUpAndDown1stDigita) | |
| TEST (FirstCodeTest, get90000WhenOnceDown5thDigit) | |
| TEST (FirstCodeTest, get0When10thDown5thDigit) | |
| TEST (FirstCodeTest, get12345WhenOnceDown5thDigit) | |
| TEST (FirstCodeTest, get5WhenDoNotChangeLeftAndRightAnyDigitNumber) | |
| TEST (FirstCodeTest, get4WhenOnceChangeRightDigitNumber) | |
| TEST (FirstCodeTest, get5When5thChangeRightDigitNumber) | |
| TEST (FirstCodeTest, get5WhenOnceChangeLeftDigitNumberAfterTwiceChangeRightDigitNumber) | |
| TEST (FirstCodeTest, get1WhenOnceChangeLeftDigitNumber) | |
| TEST (InitialPositionCodeDecoderTest, getInitialPositionCodeListTest1) | |
| TEST (InitialPositionCodeDecoderTest, getInitialPositionPowerBlockCodeTest1) | |
| TEST (InitialPositionCodeDecoderTest, returnInitialPositionCodeListByNegativeIntegerTest) | |
| TEST (InitialPositionCodeDecoderTest, decodePowerBlockCodeTest1) | |
| TEST (InitialPositionCodeDecoderTest, decodeFirstColorBlockOfCodeTest1) | |
| TEST (InitialPositionCodeDecoderTest, decodeSecondColorBlockOfCodeTest1) | |
| TEST (InitialPositionCodeDecoderTest, decodeThirdColorBlockOfCodeTest1) | |
| TEST (InitialPositionCodeDecoderTest, decodeFourthColorBlockOfCodeTest1) | |
| TEST (InitialPositionCodeDecoderTest, decodeRandomCodeTest) | |
| TEST_F (LeftCourseTest, runTest) | |
| TEST (LeftNormalCourseTest, CreateTest) | |
| TEST_F (LifterTest, setDefaultCountTest) | |
| TEST_F (LifterTest, getCurrentAngleTest1) | |
| TEST_F (LifterTest, getCurrentAngleTest2) | |
| TEST_F (LifterTest, limitPwmTest1) | |
| TEST_F (LifterTest, limitPwmTest2) | |
| TEST_F (LifterTest, limitPwmTest3) | |
| TEST_F (LifterTest, limitPwmTest4) | |
| TEST_F (LifterTest, liftUpTest1) | |
| TEST_F (LifterTest, liftUpTest2) | |
| TEST_F (LifterTest, liftDownTest1) | |
| TEST_F (LifterTest, liftDownTest2) | |
| TEST_F (LifterTest, defaultSetTest1) | |
| TEST_F (LifterTest, defaultSetTest2) | |
| TEST_F (LineTracerWalkerTest, runLineTest) | |
| TEST_F (LineTracerWalkerTest, setForwardTest) | |
| TEST (LPF, sensorTest) | |
| TEST (MotorAngleTest, absoluteAngleMeanTestPositive) | |
| TEST (MotorAngleTest, absoluteAngleMeanTestNegative) | |
| TEST (MotorAngleTest, absoluteAngleMeanTestZero) | |
| TEST (MotorAngleTest, relativeAngleMeanTestPositive) | |
| TEST (MotorAngleTest, relativeAngleMeanNegative) | |
| TEST (MotorAngleTest, relativeAngleMeanZero) | |
| TEST (MotorAngleTest, angularDifferenceTestPositive) | |
| TEST (MotorAngleTest, angularDifferenceTestNegative) | |
| TEST (MotorAngleTest, angularDifferenceTestZero) | |
| TEST (MotorAngleTest, absoluteValueOfAngleTest) | |
| TEST (NavigatorTest, resetTest) | |
| TEST (NodeTest, getInitialValueOfNodeIDTest) | |
| TEST (NodeTest, getInitialValueOfBlockExistsTest) | |
| TEST (NodeTest, getInitialValueOfPositionTest) | |
| TEST (NodeTest, getValueOfNodeIDTest) | |
| TEST (NodeTest, initializeValueOfNodeIDTest) | |
| TEST (NodeTest, getValueOfBlockExistsTest) | |
| TEST (NodeTest, getValueOfPositionTest) | |
| TEST (NodeTest, getValueOfNeighborListTest) | |
| TEST (NodeTest, getValueOf3NeighborListTest) | |
| TEST (NodeTest, getValueOfNeighborListOf3x3Test) | |
| TEST (NodeTest, getValueOfNeighborListOf4x4Test) | |
| TEST (NodeTest, getValueOfNeighborListOfETRobocon2018Test) | |
| TEST (NodeTest, getValueOfNeighborListOfETRobocon2017Test) | |
| TEST_F (NormalCourseTest, stopTest) | |
| TEST (PidTest, CalculateTest1) | |
| TEST (detectBarrierTest, CalculateTest2) | |
| TEST (PidTest, limitOutputTest1) | |
| TEST (PidTest, limitOutputTest2) | |
| TEST (PidTest, limitOutputTest3) | |
| TEST (RightNormalCourseTest, CreateTest) | |
| TEST (RightNormalCourseTest, runTest) | |
| TEST (SelectorTest, getBlockPositionListTest) | |
| TEST (SelectorTest, searchRouteByExplorerTest) | |
| TEST (SelectorTest, searchNode8Test) | |
| TEST (SelectorTest, searchNode9Test) | |
| TEST (SelectorTest, searchNode1Test) | |
| TEST (SelectorTest, searchNode10Test) | |
| TEST (SelectorTest, searchNode6Test) | |
| TEST (SelectorTest, searchNode0Test) | |
| TEST (SelectorTest, checkWhetherThereIsMovedBlock) | |
| TEST (SelectorTest, checkNextOperationIsAllFalseInInitialStageTest) | |
| TEST (SelectorTest, checkNextOperationIsAllFalseWithoutSetNextWhenNextIsSetTest) | |
| TEST (SelectorTest, checkThereAreNotNodeInInitialRouteTest) | |
| TEST (SelectorTest, getSomeNodeInRouteWhenRouteIsSetTest) | |
| TEST (SelectorTest, getNextPositionInCenterIfColorSetInNodeIDTest) | |
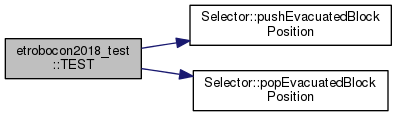
| TEST (SelectorTest, checkPushingAndPoppingByPseudoStackTest) | |
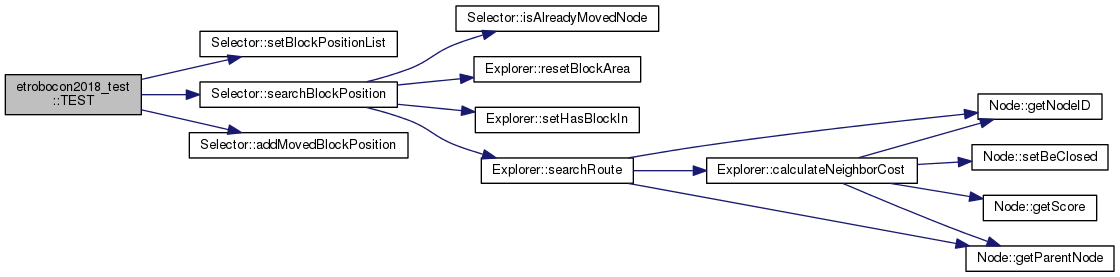
| TEST (SelectorTest, searchNodeInSenarioTest) | |
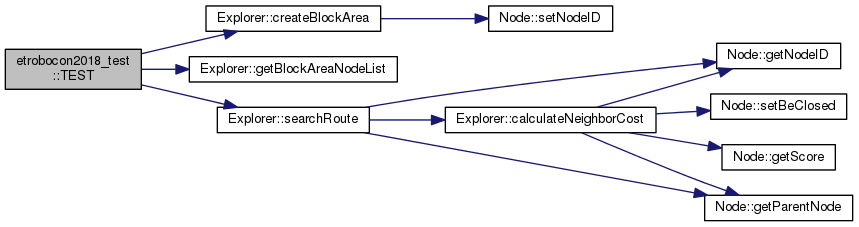
| TEST (SelectorTest, searchRouteInSenarioTest) | |
| TEST (SelectorTest, searchRouteWhenPathBlocked) | |
| TEST (SelectorTest, searchRouteWhenNextMovedPositionIsBuried) | |
| TEST (SelectorTest, searchRouteWhenNextOfNextOfNextMovedPositionIsBuried) | |
| TEST (SelectorTest, searchRouteWhenEachNextMovedPositionsIsLooped) | |
| TEST (SelectorTest, searchRouteWhenAllNodeInitialPositionsIsFromCenterQuadirilateralTest) | |
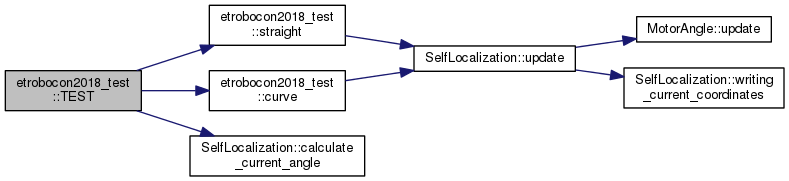
| void | straight (SelfLocalization &sl, int kyori, int &l, int &r) |
| void | curve (SelfLocalization &sl, float sub_degree, int &l, int &r) |
| TEST (SelfLocalizationTest, CalculateTest1) | |
| TEST (SelfLocalizationTest, calculateBetweenEv3AndBorder1) | |
| TEST (SelfLocalizationTest, calculateBetweenEv3AndBorder2) | |
| TEST (SelfLocalizationTest, calculateBetweenEv3AndBorder3) | |
| TEST (SelfLocalizationTest, calculateBetweenEv3AndBorder4) | |
| TEST (SelfLocalizationTest, calculateBetweenEv3AndBorder5) | |
| TEST (SelfLocalizationTest, calculateCurrentAngleTest1) | |
| TEST (SelfLocalizationTest, calculateCurrentAngleTest2) | |
| TEST (SelfLocalizationTest, calculateCurrentAngleTest3) | |
| TEST (SelfLocalizationTest, isOverNormalVectorTest1) | |
| TEST (SelfLocalizationTest, isOverNormalVectorTest2) | |
| TEST (SelfLocalizationTest, isOverNormalVectorTest3) | |
| TEST (SelfLocalizationTest, isOverNormalVectorTest4) | |
| TEST (SpeedControlTest, calculateSpeedForPidTest1) | |
| TEST (SpeedControlTest, calculateSpeedForPidTest2) | |
| TEST (SpeedControlTest, calcDistance4msTest1) | |
| TEST (TurnControlTest, CreateTest) | |
| TEST_F (UserInterfaceTest, setBrightnessWithColorTest) | |
| TEST_F (UserInterfaceTest, setBrightnessTest) | |
| TEST (WalkerTest, CreateTest) | |
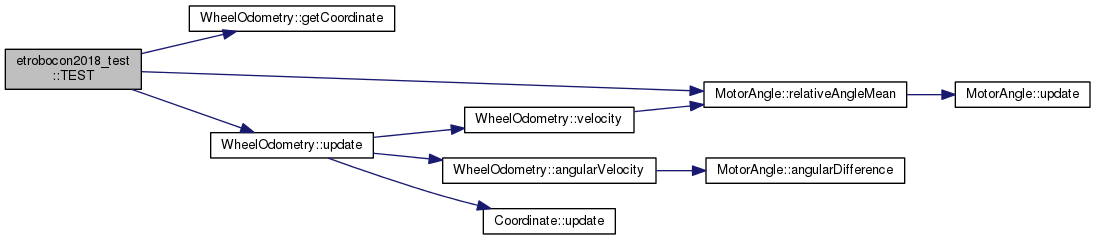
| TEST (CoordinateTest, updateTest) | |
| TEST (CoordinateTest, updateTest2) | |
| TEST (CoordinateTest, resetTest) | |
| TEST (WheelOdometryTest, velocityTest) | |
| TEST (WheelOdometryTest, velocityTestHuge) | |
| TEST (WheelOdometryTest, angularVelocityTest) | |
| TEST (WheelOdometryTest, resetTest) | |
| TEST (WheelOdometryTest, updateTest) | |
| TEST (WheelOdometryTest, updateCoordinateTest) | |
| TEST (WheelOdometryTest, getRotationAngleTest) | |
| TEST (WheelOdometryTest, getCoordinateTest) | |
| TEST (WheelOdometryTest, getPointXTest) | |
| TEST (WheelOdometryTest, getPointYTest) | |
| void etrobocon2018_test::curve | ( | SelfLocalization & | sl, |
| float | sub_degree, | ||
| int & | l, | ||
| int & | r | ||
| ) |
SelfLocalizationTest.cpp の 24 行目に定義があります。


| void etrobocon2018_test::straight | ( | SelfLocalization & | sl, |
| int | kyori, | ||
| int & | l, | ||
| int & | r | ||
| ) |
SelfLocalizationTest.cpp の 15 行目に定義があります。


| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| absoluteAngleMeanTestPositive | |||
| ) |
MotorAngleTest.cpp の 8 行目に定義があります。

| etrobocon2018_test::TEST | ( | CoordinateTest | , |
| updateTest | |||
| ) |
WheelOdometryTest.cpp の 9 行目に定義があります。

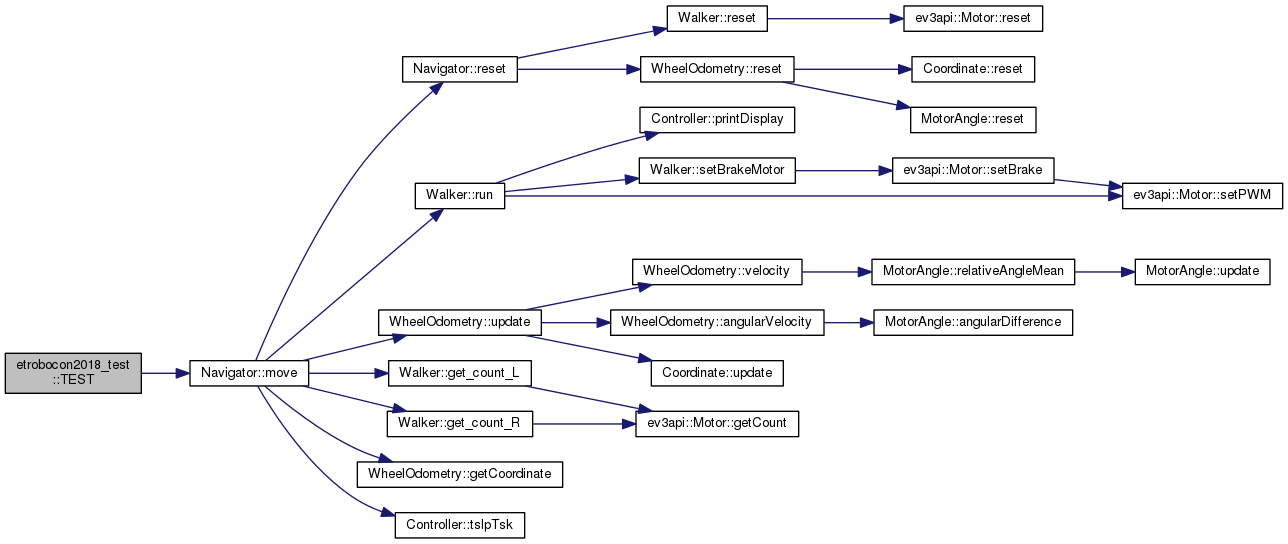
| etrobocon2018_test::TEST | ( | NavigatorTest | , |
| resetTest | |||
| ) |
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| construct | |||
| ) |
AIAnswerArrayTest.cpp の 10 行目に定義があります。
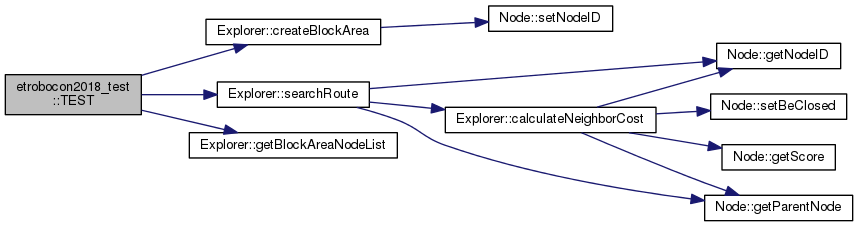
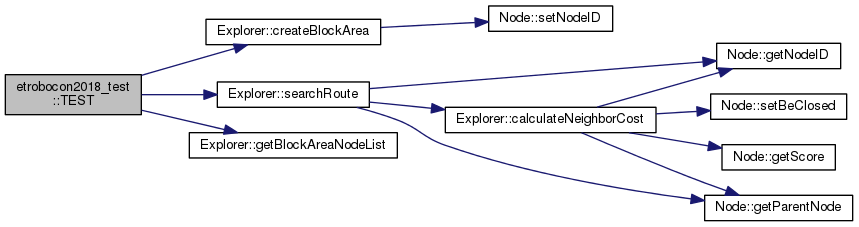
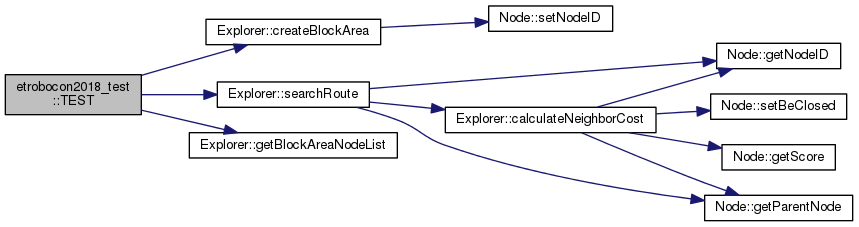
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| getInitialValueOfBlockAreaNodeListTest | |||
| ) |
ExplorerTest.cpp の 11 行目に定義があります。

| etrobocon2018_test::TEST | ( | LPF | , |
| sensorTest | |||
| ) |
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getInitialValueOfNodeIDTest | |||
| ) |
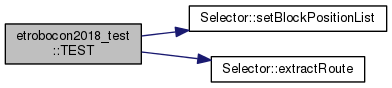
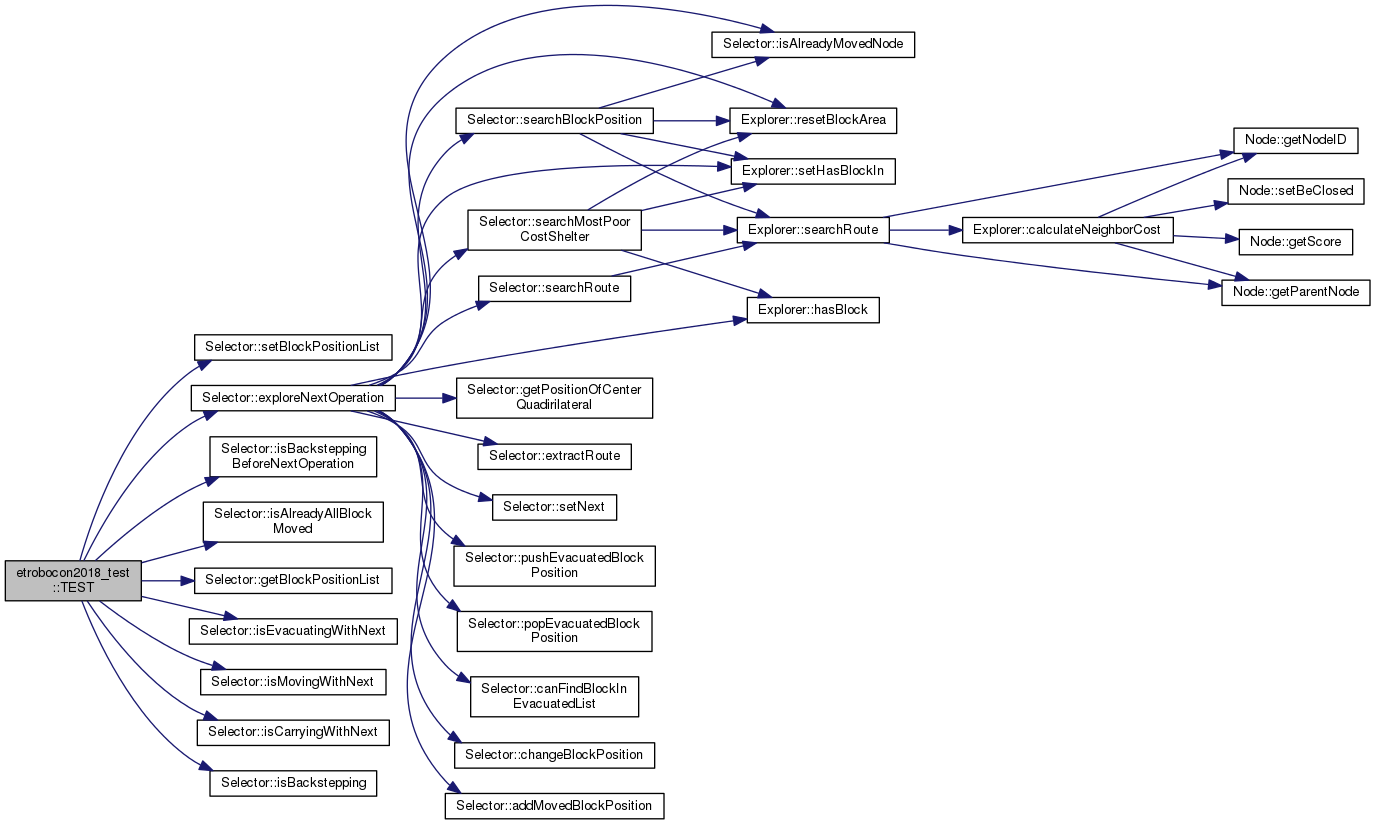
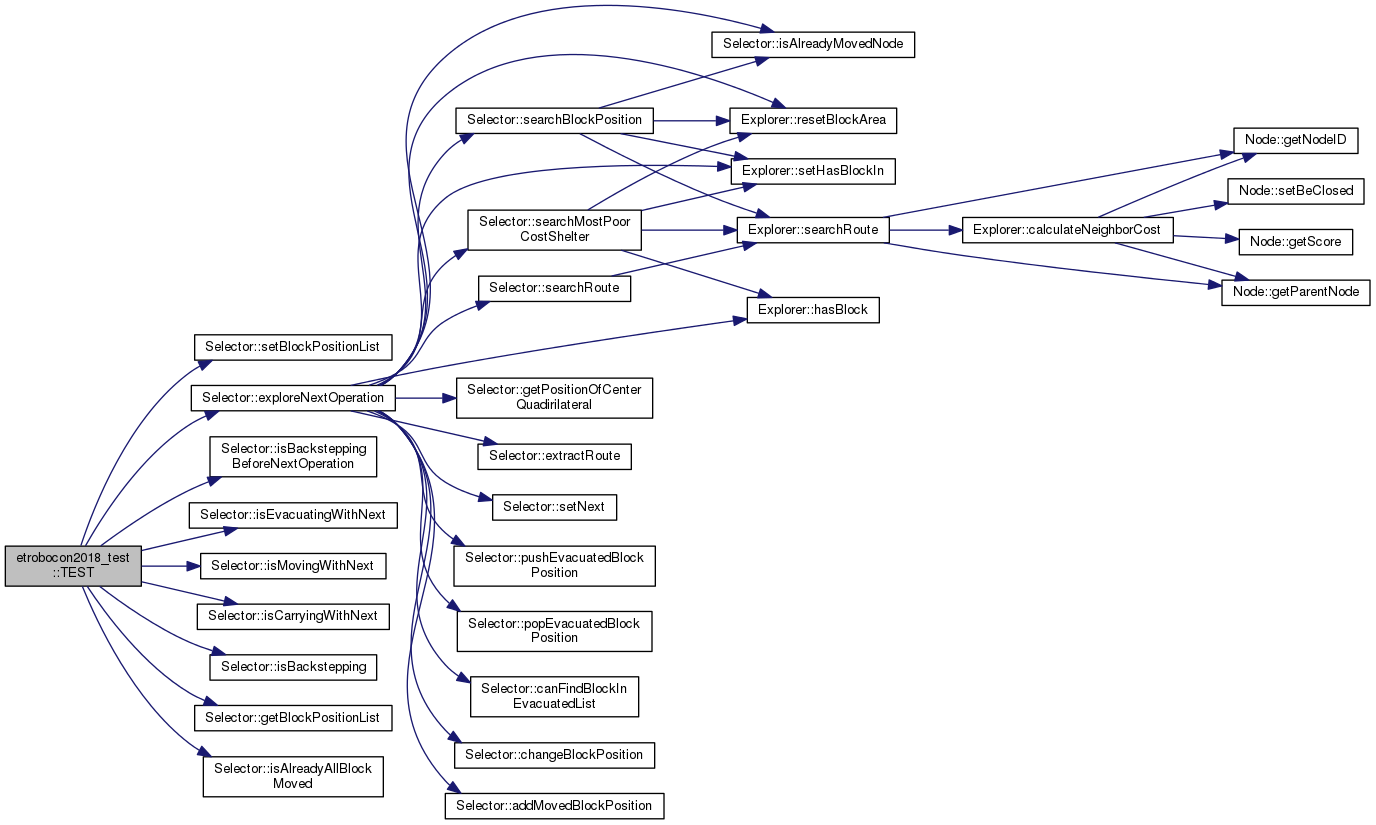
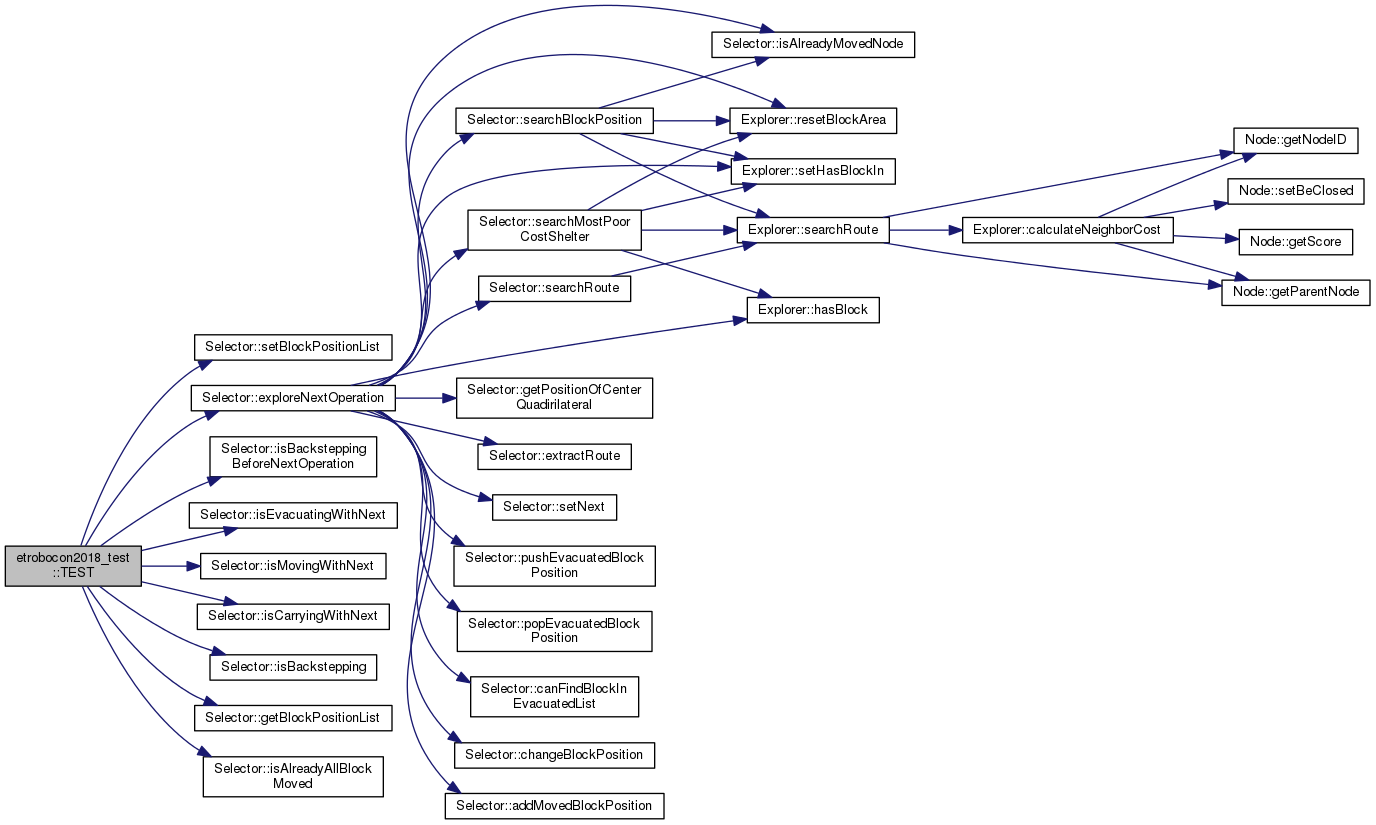
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| getBlockPositionListTest | |||
| ) |
SelectorTest.cpp の 11 行目に定義があります。
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| constructSpecifiedSize | |||
| ) |
AIAnswerArrayTest.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | LeftNormalCourseTest | , |
| CreateTest | |||
| ) |
LeftNormalCourseTest.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | TurnControlTest | , |
| CreateTest | |||
| ) |
TurnControlTest.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | WalkerTest | , |
| CreateTest | |||
| ) |
WalkerTest.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | DistanceTest | , |
| getDistanceTotalTest1 | |||
| ) |
DistanceTest.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | EtRobocon2018Test | , |
| CreateTest | |||
| ) |
EtRobocon2018Test.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | RightNormalCourseTest | , |
| CreateTest | |||
| ) |
RightNormalCourseTest.cpp の 15 行目に定義があります。
| etrobocon2018_test::TEST | ( | SpeedControlTest | , |
| calculateSpeedForPidTest1 | |||
| ) |
SpeedControlTest.cpp の 16 行目に定義があります。
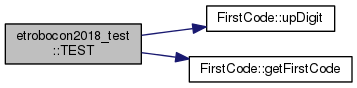
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get0WhenNoneUpAndDownAnyDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | ColorBlockTest | , |
| createColorBlock | |||
| ) |
BlockAreaTest.cpp の 17 行目に定義があります。
| etrobocon2018_test::TEST | ( | RightNormalCourseTest | , |
| runTest | |||
| ) |
RightNormalCourseTest.cpp の 17 行目に定義があります。

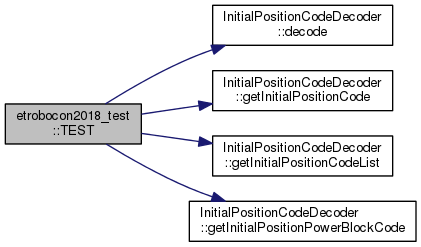
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| getInitialPositionCodeListTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 17 行目に定義があります。

| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| absoluteAngleMeanTestNegative | |||
| ) |
MotorAngleTest.cpp の 18 行目に定義があります。

| etrobocon2018_test::TEST | ( | CoordinateTest | , |
| updateTest2 | |||
| ) |
WheelOdometryTest.cpp の 19 行目に定義があります。

| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| constructSpecifiedType | |||
| ) |
AIAnswerArrayTest.cpp の 20 行目に定義があります。
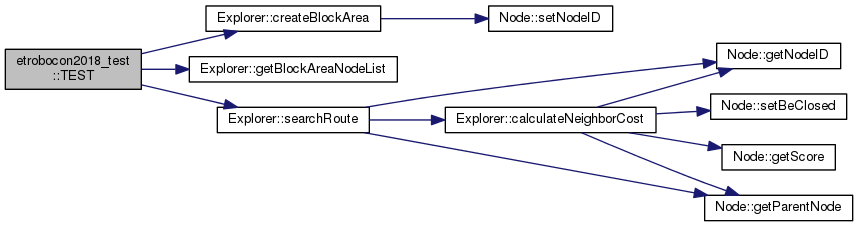
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| getValueOfBlockAreaNodeListTest | |||
| ) |
ExplorerTest.cpp の 21 行目に定義があります。

| etrobocon2018_test::TEST | ( | NodeTest | , |
| getInitialValueOfBlockExistsTest | |||
| ) |
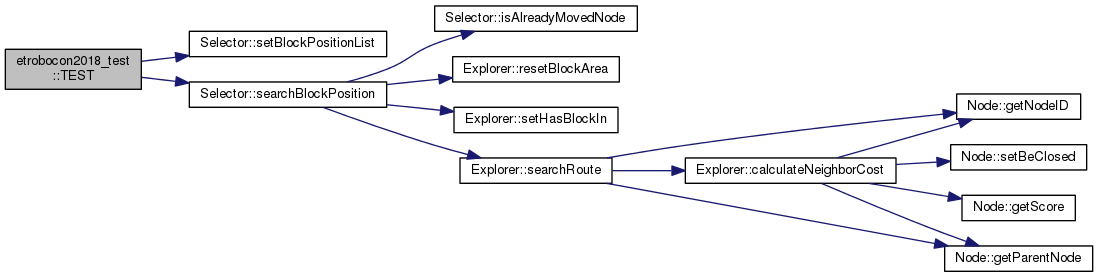
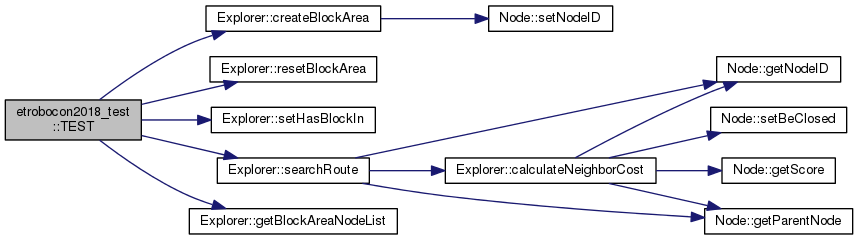
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteByExplorerTest | |||
| ) |
SelectorTest.cpp の 23 行目に定義があります。
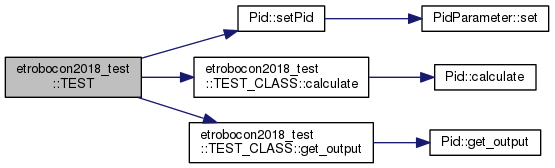
| etrobocon2018_test::TEST | ( | PidTest | , |
| CalculateTest1 | |||
| ) |
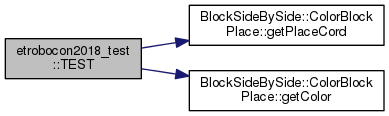
| etrobocon2018_test::TEST | ( | ColorBlockPlaceTest | , |
| createColorBlockPlace | |||
| ) |
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| sizeTest | |||
| ) |
AIAnswerArrayTest.cpp の 26 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get10000WhenOnceUp5thDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | DistanceTest | , |
| getDistanceCurrentTest1 | |||
| ) |
DistanceTest.cpp の 26 行目に定義があります。
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| getInitialPositionPowerBlockCodeTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 28 行目に定義があります。

| etrobocon2018_test::TEST | ( | SpeedControlTest | , |
| calculateSpeedForPidTest2 | |||
| ) |
SpeedControlTest.cpp の 28 行目に定義があります。
| etrobocon2018_test::TEST | ( | BlockSolverTest | , |
| getChangeDirection | |||
| ) |
BlockSolverTest.cpp の 31 行目に定義があります。
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getInitialValueOfPositionTest | |||
| ) |
| etrobocon2018_test::TEST | ( | ColorBlockPlaceTest | , |
| setColorBlock | |||
| ) |
BlockAreaTest.cpp の 32 行目に定義があります。
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| absoluteAngleMeanTestZero | |||
| ) |
MotorAngleTest.cpp の 33 行目に定義があります。

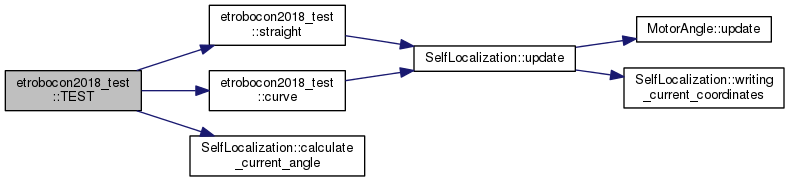
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| CalculateTest1 | |||
| ) |
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| positionTest | |||
| ) |
AIAnswerArrayTest.cpp の 35 行目に定義があります。
| etrobocon2018_test::TEST | ( | CoordinateTest | , |
| resetTest | |||
| ) |
WheelOdometryTest.cpp の 37 行目に定義があります。
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get1000WhenOnceUp4thDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | detectBarrierTest | , |
| CalculateTest2 | |||
| ) |
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| returnInitialPositionCodeListByNegativeIntegerTest | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 39 行目に定義があります。
| etrobocon2018_test::TEST | ( | DistanceTest | , |
| getDistanceCurrentTest2 | |||
| ) |
DistanceTest.cpp の 41 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNode8Test | |||
| ) |
SelectorTest.cpp の 41 行目に定義があります。
| etrobocon2018_test::TEST | ( | ColorBlockPlaceTest | , |
| connectColorBlockPlace | |||
| ) |
BlockAreaTest.cpp の 42 行目に定義があります。
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| relativeAngleMeanTestPositive | |||
| ) |
MotorAngleTest.cpp の 43 行目に定義があります。

| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateBetweenEv3AndBorder1 | |||
| ) |
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfNodeIDTest | |||
| ) |
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| atTest | |||
| ) |
AIAnswerArrayTest.cpp の 47 行目に定義があります。
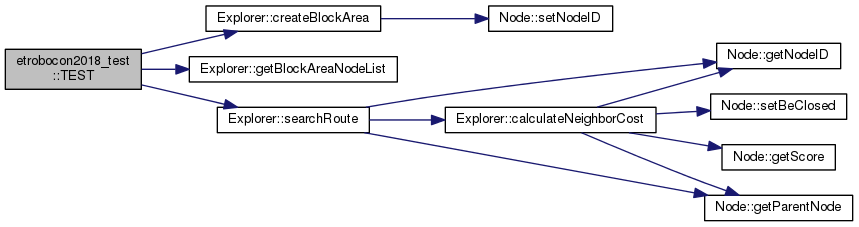
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| checkNodeHadBlockTest | |||
| ) |
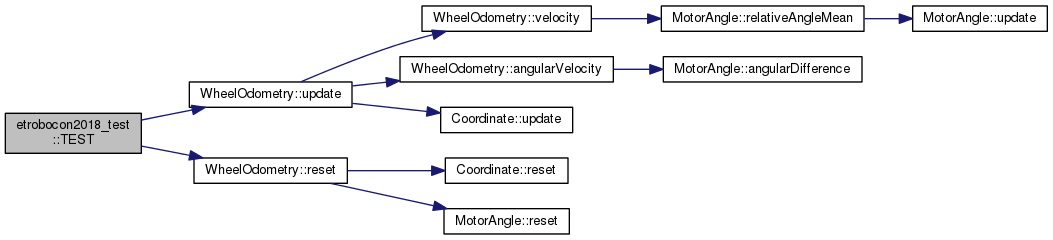
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| velocityTest | |||
| ) |
WheelOdometryTest.cpp の 48 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get100WhenOnceUp3rdDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | PidTest | , |
| limitOutputTest1 | |||
| ) |
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| decodePowerBlockCodeTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 51 行目に定義があります。
| etrobocon2018_test::TEST | ( | BlockSolverTest | , |
| move | |||
| ) |
BlockSolverTest.cpp の 51 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateBetweenEv3AndBorder2 | |||
| ) |
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNode9Test | |||
| ) |
SelectorTest.cpp の 54 行目に定義があります。
| etrobocon2018_test::TEST | ( | ColorBlockPlaceTest | , |
| dynamicCreateColorBlockPlace | |||
| ) |
BlockAreaTest.cpp の 55 行目に定義があります。
| etrobocon2018_test::TEST | ( | SpeedControlTest | , |
| calcDistance4msTest1 | |||
| ) |
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| velocityTestHuge | |||
| ) |
WheelOdometryTest.cpp の 58 行目に定義があります。

| etrobocon2018_test::TEST | ( | NodeTest | , |
| initializeValueOfNodeIDTest | |||
| ) |
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateBetweenEv3AndBorder3 | |||
| ) |
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| relativeAngleMeanNegative | |||
| ) |
MotorAngleTest.cpp の 59 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get10WhenOnceUp2ndDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| atTestDouble | |||
| ) |
AIAnswerArrayTest.cpp の 59 行目に定義があります。
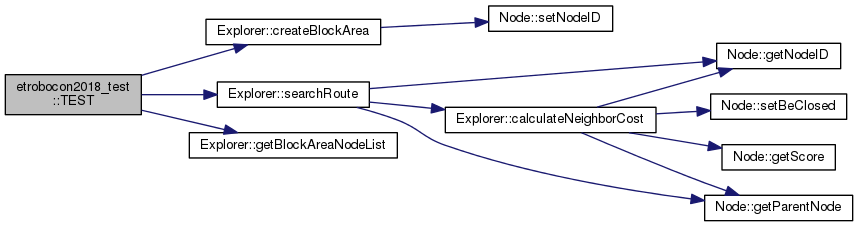
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom0To1Test | |||
| ) |
ExplorerTest.cpp の 62 行目に定義があります。
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| decodeFirstColorBlockOfCodeTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 64 行目に定義があります。
| etrobocon2018_test::TEST | ( | PidTest | , |
| limitOutputTest2 | |||
| ) |
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateBetweenEv3AndBorder4 | |||
| ) |
| etrobocon2018_test::TEST | ( | BlockSolverTest | , |
| move2 | |||
| ) |
BlockSolverTest.cpp の 67 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNode1Test | |||
| ) |
SelectorTest.cpp の 67 行目に定義があります。
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| operatorTest | |||
| ) |
AIAnswerArrayTest.cpp の 68 行目に定義があります。

| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfBlockExistsTest | |||
| ) |
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| angularVelocityTest | |||
| ) |
WheelOdometryTest.cpp の 69 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get1WhenOnceUp1stDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateBetweenEv3AndBorder5 | |||
| ) |
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| relativeAngleMeanZero | |||
| ) |
MotorAngleTest.cpp の 74 行目に定義があります。

| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| decodeSecondColorBlockOfCodeTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 77 行目に定義があります。
| etrobocon2018_test::TEST | ( | PidTest | , |
| limitOutputTest3 | |||
| ) |
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom1To0Test | |||
| ) |
ExplorerTest.cpp の 79 行目に定義があります。
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| resetTest | |||
| ) |
WheelOdometryTest.cpp の 79 行目に定義があります。
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| castTest | |||
| ) |
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateCurrentAngleTest1 | |||
| ) |
SelfLocalizationTest.cpp の 80 行目に定義があります。
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfPositionTest | |||
| ) |
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNode10Test | |||
| ) |
SelectorTest.cpp の 80 行目に定義があります。
| etrobocon2018_test::TEST | ( | BlockSolverTest | , |
| runrun | |||
| ) |
BlockSolverTest.cpp の 81 行目に定義があります。
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| angularDifferenceTestPositive | |||
| ) |
MotorAngleTest.cpp の 81 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get0When10thUp5thDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| probsTest | |||
| ) |
AIAnswerArrayTest.cpp の 86 行目に定義があります。
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| decodeThirdColorBlockOfCodeTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 90 行目に定義があります。
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| updateTest | |||
| ) |
WheelOdometryTest.cpp の 90 行目に定義があります。

| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| angularDifferenceTestNegative | |||
| ) |
MotorAngleTest.cpp の 90 行目に定義があります。

| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNode6Test | |||
| ) |
SelectorTest.cpp の 93 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateCurrentAngleTest2 | |||
| ) |
SelfLocalizationTest.cpp の 94 行目に定義があります。
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get0WhenOnceUpAndDown1stDigita | |||
| ) |
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfNeighborListTest | |||
| ) |
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom8To9Test | |||
| ) |
ExplorerTest.cpp の 96 行目に定義があります。
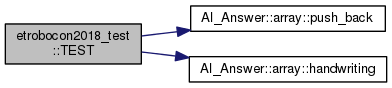
| etrobocon2018_test::TEST | ( | AIAnswerArrayTest | , |
| handwritingTest | |||
| ) |
AIAnswerArrayTest.cpp の 96 行目に定義があります。
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| angularDifferenceTestZero | |||
| ) |
MotorAngleTest.cpp の 99 行目に定義があります。

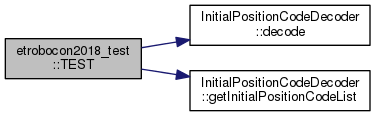
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| decodeFourthColorBlockOfCodeTest1 | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 103 行目に定義があります。
| etrobocon2018_test::TEST | ( | MotorAngleTest | , |
| absoluteValueOfAngleTest | |||
| ) |
MotorAngleTest.cpp の 105 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get90000WhenOnceDown5thDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNode0Test | |||
| ) |
SelectorTest.cpp の 107 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| calculateCurrentAngleTest3 | |||
| ) |
SelfLocalizationTest.cpp の 108 行目に定義があります。
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| updateCoordinateTest | |||
| ) |
WheelOdometryTest.cpp の 109 行目に定義があります。
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom11To10Test | |||
| ) |
ExplorerTest.cpp の 113 行目に定義があります。
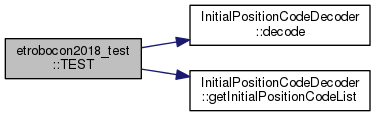
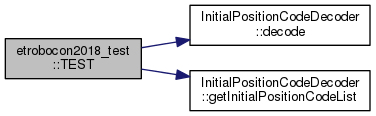
| etrobocon2018_test::TEST | ( | InitialPositionCodeDecoderTest | , |
| decodeRandomCodeTest | |||
| ) |
InitialPositionCodeDecoderTest.cpp の 116 行目に定義があります。
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOf3NeighborListTest | |||
| ) |
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get0When10thDown5thDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| checkWhetherThereIsMovedBlock | |||
| ) |
SelectorTest.cpp の 120 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| isOverNormalVectorTest1 | |||
| ) |
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| getRotationAngleTest | |||
| ) |
WheelOdometryTest.cpp の 128 行目に定義があります。

| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom0To2Test | |||
| ) |
ExplorerTest.cpp の 130 行目に定義があります。
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get12345WhenOnceDown5thDigit | |||
| ) |
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| isOverNormalVectorTest2 | |||
| ) |
| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| isOverNormalVectorTest3 | |||
| ) |
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| checkNextOperationIsAllFalseInInitialStageTest | |||
| ) |
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| getCoordinateTest | |||
| ) |
WheelOdometryTest.cpp の 141 行目に定義があります。

| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfNeighborListOf3x3Test | |||
| ) |
NodeTest.cpp の 145 行目に定義があります。

| etrobocon2018_test::TEST | ( | SelfLocalizationTest | , |
| isOverNormalVectorTest4 | |||
| ) |
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom2To0Test | |||
| ) |
ExplorerTest.cpp の 147 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| checkNextOperationIsAllFalseWithoutSetNextWhenNextIsSetTest | |||
| ) |
SelectorTest.cpp の 149 行目に定義があります。
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get5WhenDoNotChangeLeftAndRightAnyDigitNumber | |||
| ) |
| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| getPointXTest | |||
| ) |
WheelOdometryTest.cpp の 152 行目に定義があります。

| etrobocon2018_test::TEST | ( | WheelOdometryTest | , |
| getPointYTest | |||
| ) |
WheelOdometryTest.cpp の 160 行目に定義があります。

| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get4WhenOnceChangeRightDigitNumber | |||
| ) |
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchShortestRouteFrom11To5Test | |||
| ) |
ExplorerTest.cpp の 164 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| checkThereAreNotNodeInInitialRouteTest | |||
| ) |
SelectorTest.cpp の 170 行目に定義があります。
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get5When5thChangeRightDigitNumber | |||
| ) |
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom11To5Circumventing6Test | |||
| ) |
ExplorerTest.cpp の 181 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| getSomeNodeInRouteWhenRouteIsSetTest | |||
| ) |
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get5WhenOnceChangeLeftDigitNumberAfterTwiceChangeRightDigitNumber | |||
| ) |
| etrobocon2018_test::TEST | ( | FirstCodeTest | , |
| get1WhenOnceChangeLeftDigitNumber | |||
| ) |
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom11To5Circumventing6And10Test | |||
| ) |
ExplorerTest.cpp の 199 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| getNextPositionInCenterIfColorSetInNodeIDTest | |||
| ) |
SelectorTest.cpp の 204 行目に定義があります。

| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom13To6Circumventing10Test | |||
| ) |
ExplorerTest.cpp の 217 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| checkPushingAndPoppingByPseudoStackTest | |||
| ) |
SelectorTest.cpp の 225 行目に定義があります。
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteFrom11To5Circumventing6And9And10Test | |||
| ) |
ExplorerTest.cpp の 237 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchNodeInSenarioTest | |||
| ) |
SelectorTest.cpp の 247 行目に定義があります。
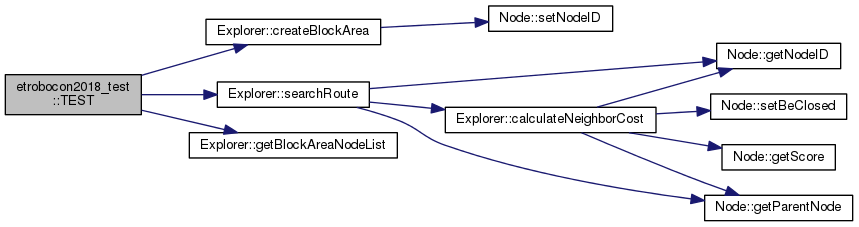
| etrobocon2018_test::TEST | ( | ExplorerTest | , |
| searchRouteInSenarioTest | |||
| ) |
ExplorerTest.cpp の 256 行目に定義があります。
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfNeighborListOf4x4Test | |||
| ) |
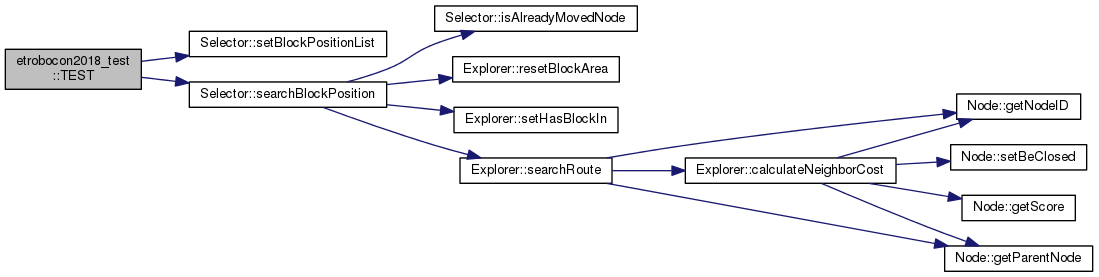
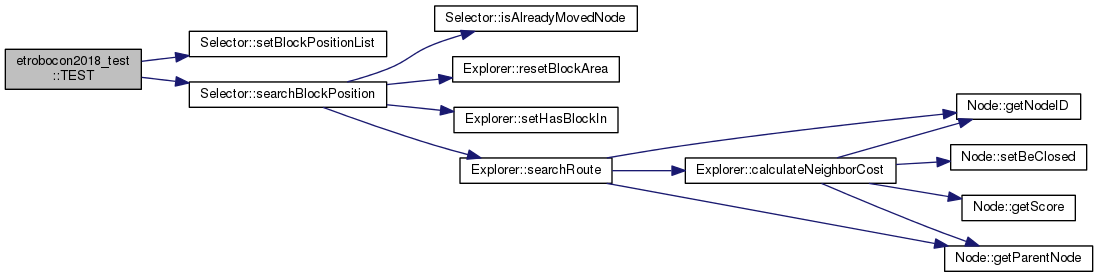
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteInSenarioTest | |||
| ) |
SelectorTest.cpp の 281 行目に定義があります。
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfNeighborListOfETRobocon2018Test | |||
| ) |
NodeTest.cpp の 346 行目に定義があります。
| etrobocon2018_test::TEST | ( | NodeTest | , |
| getValueOfNeighborListOfETRobocon2017Test | |||
| ) |
NodeTest.cpp の 426 行目に定義があります。
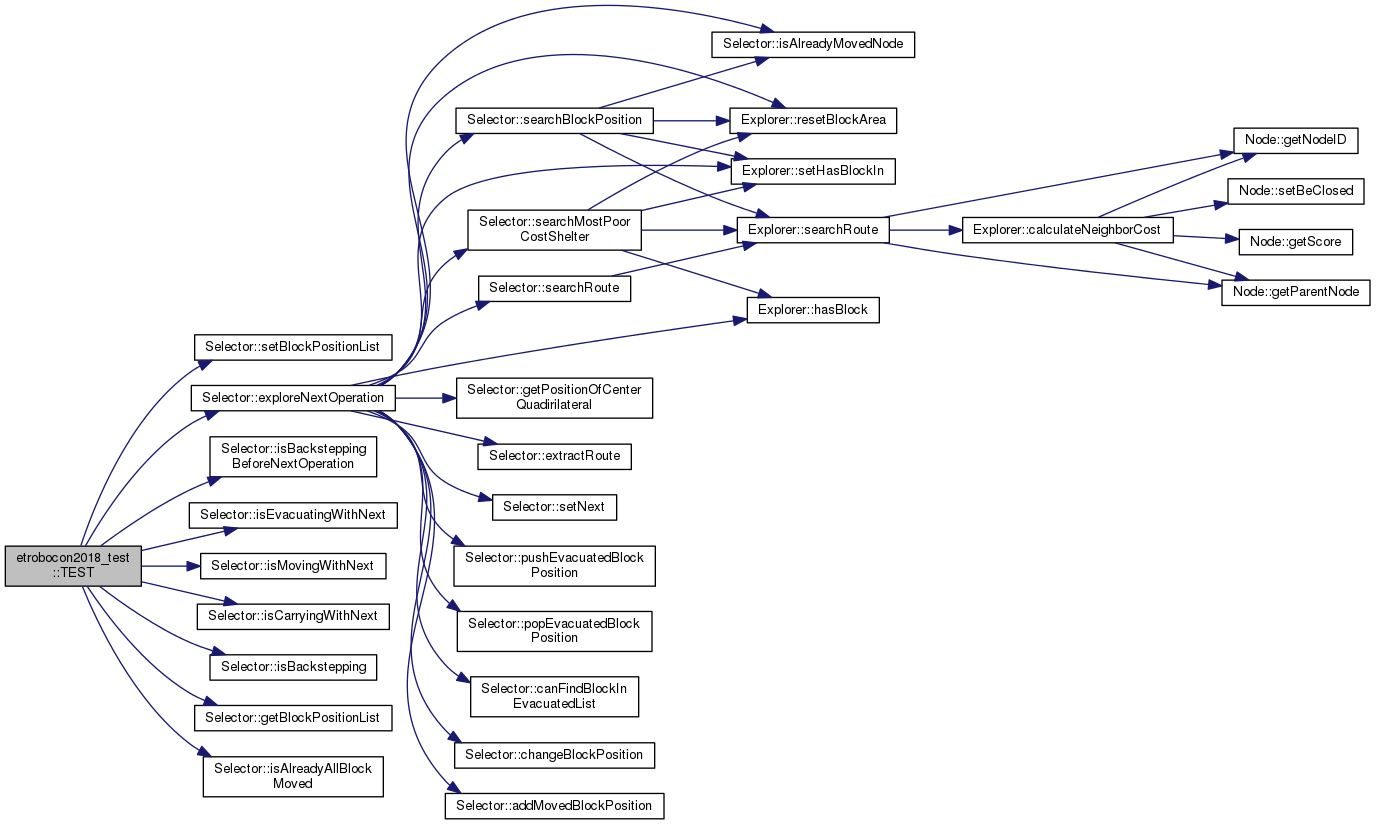
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteWhenPathBlocked | |||
| ) |
SelectorTest.cpp の 453 行目に定義があります。
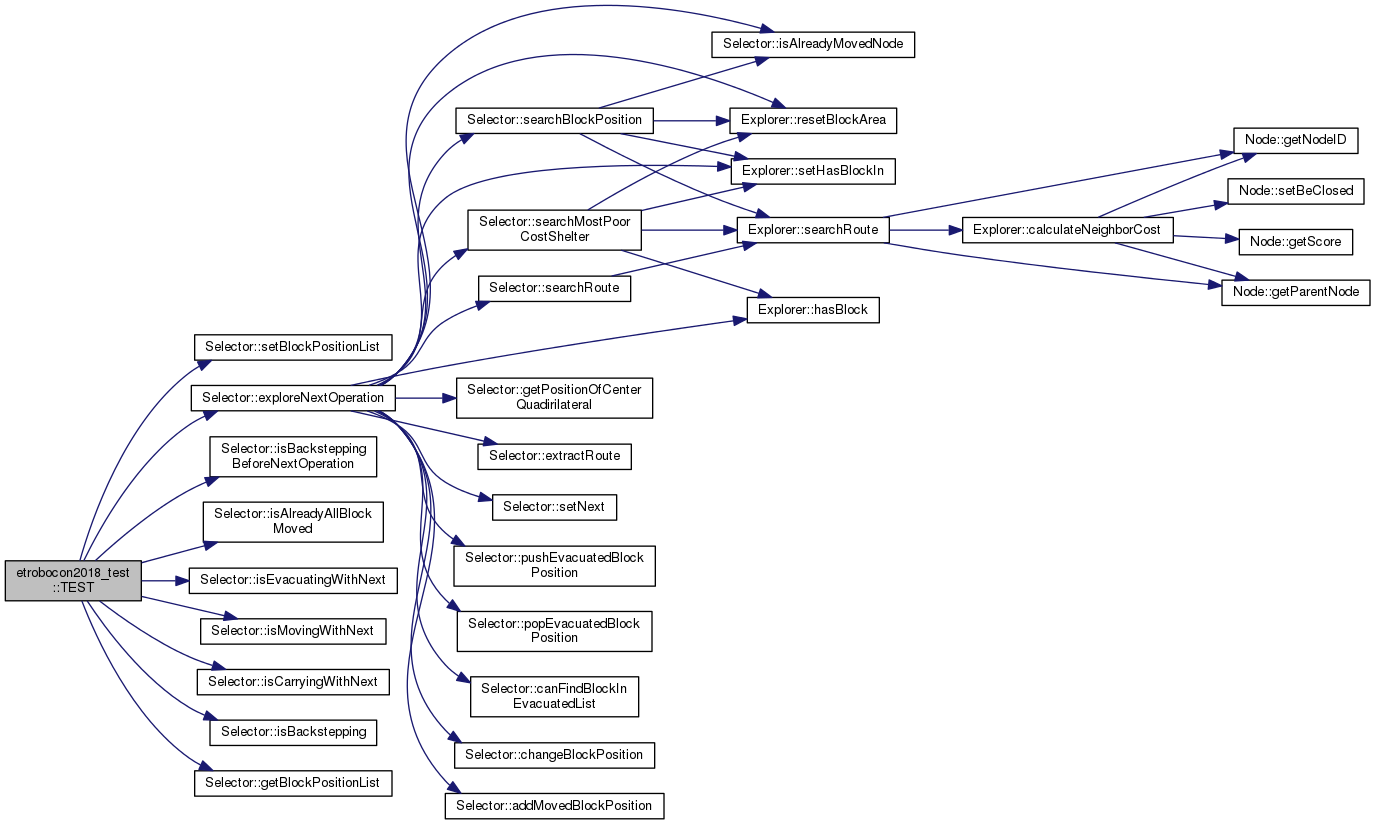
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteWhenNextMovedPositionIsBuried | |||
| ) |
SelectorTest.cpp の 649 行目に定義があります。
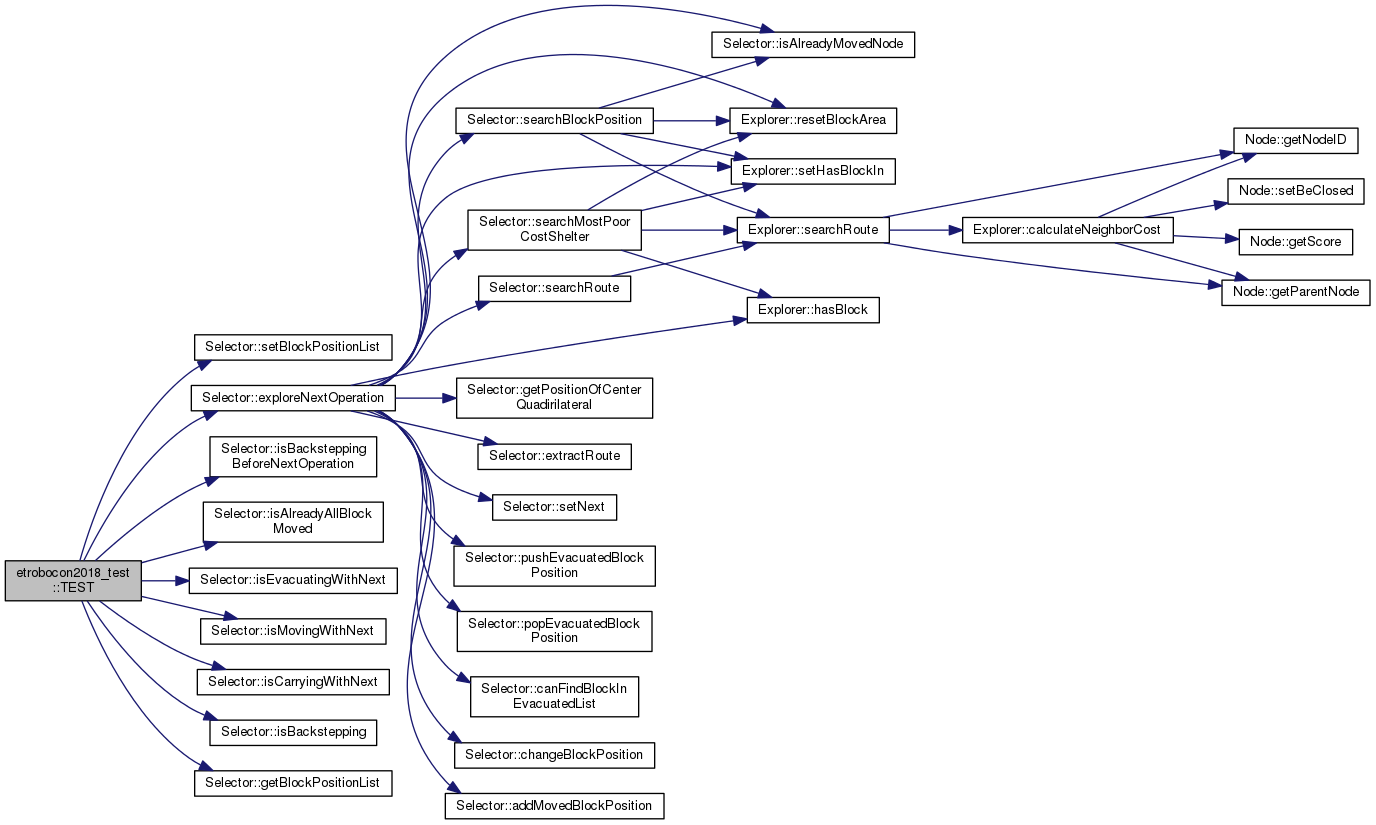
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteWhenNextOfNextOfNextMovedPositionIsBuried | |||
| ) |
SelectorTest.cpp の 844 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteWhenEachNextMovedPositionsIsLooped | |||
| ) |
SelectorTest.cpp の 1052 行目に定義があります。
| etrobocon2018_test::TEST | ( | SelectorTest | , |
| searchRouteWhenAllNodeInitialPositionsIsFromCenterQuadirilateralTest | |||
| ) |
SelectorTest.cpp の 1296 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LineTracerWalkerTest | , |
| runLineTest | |||
| ) |
LineTracerWalkerTest.cpp の 21 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | NormalCourseTest | , |
| stopTest | |||
| ) |
NormalCourseTest.cpp の 23 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LineTracerWalkerTest | , |
| setForwardTest | |||
| ) |
LineTracerWalkerTest.cpp の 23 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LeftCourseTest | , |
| runTest | |||
| ) |
LeftCourseTest.cpp の 23 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | DistinguisherTest | , |
| getColorWhiteTest2 | |||
| ) |
DistinguisherTest.cpp の 26 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | BlockStrategyTest | , |
| createColorBlockPlace | |||
| ) |
BlockStrategyTest.cpp の 28 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| setDefaultCountTest | |||
| ) |
LifterTest.cpp の 32 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | DistinguisherTest | , |
| getColorBlackTest1 | |||
| ) |
DistinguisherTest.cpp の 33 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| getCurrentAngleTest1 | |||
| ) |
LifterTest.cpp の 34 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| getCurrentAngleTest2 | |||
| ) |
LifterTest.cpp の 40 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | DistinguisherTest | , |
| getColorBlackTest2 | |||
| ) |
DistinguisherTest.cpp の 40 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | BlockStrategyTest | , |
| connectColorBlockPlace | |||
| ) |
BlockStrategyTest.cpp の 41 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| limitPwmTest1 | |||
| ) |
LifterTest.cpp の 42 行目に定義があります。
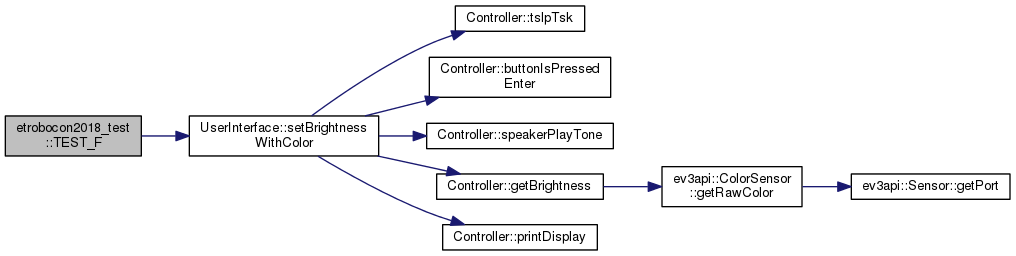
| etrobocon2018_test::TEST_F | ( | UserInterfaceTest | , |
| setBrightnessWithColorTest | |||
| ) |
UserInterfaceTest.cpp の 48 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| limitPwmTest2 | |||
| ) |
LifterTest.cpp の 49 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | BlockStrategyTest | , |
| putColorBlockPlace | |||
| ) |
BlockStrategyTest.cpp の 54 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| limitPwmTest3 | |||
| ) |
LifterTest.cpp の 56 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | UserInterfaceTest | , |
| setBrightnessTest | |||
| ) |
UserInterfaceTest.cpp の 56 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| limitPwmTest4 | |||
| ) |
LifterTest.cpp の 63 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | BlockStrategyTest | , |
| getDirection | |||
| ) |
BlockStrategyTest.cpp の 69 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| liftUpTest1 | |||
| ) |
LifterTest.cpp の 70 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| liftUpTest2 | |||
| ) |
LifterTest.cpp の 77 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| liftDownTest1 | |||
| ) |
LifterTest.cpp の 84 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| liftDownTest2 | |||
| ) |
LifterTest.cpp の 91 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| defaultSetTest1 | |||
| ) |
LifterTest.cpp の 98 行目に定義があります。
| etrobocon2018_test::TEST_F | ( | LifterTest | , |
| defaultSetTest2 | |||
| ) |
LifterTest.cpp の 107 行目に定義があります。
 1.8.6
1.8.6