|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <EtRobocon2018.h>
公開メンバ関数 | |
| EtRobocon2018 () | |
| void | start (int) |
| void | waitStarter (int) |
| void | loop () |
main的なクラス
EtRobocon2018.h の 22 行目に定義があります。
| EtRobocon2018::EtRobocon2018 | ( | ) |
| void EtRobocon2018::loop | ( | ) |
実際にマシンを動かすときの処理
EtRobocon2018.cpp の 56 行目に定義があります。

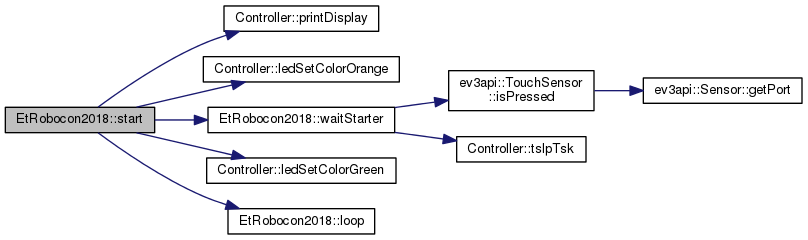
| void EtRobocon2018::start | ( | int | bluetooth_command | ) |
タッチセンサが押されたときに行われる処理
EtRobocon2018.cpp の 35 行目に定義があります。

| void EtRobocon2018::waitStarter | ( | int | bluetooth_command | ) |
 1.8.6
1.8.6




