|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <RightCourse.h>
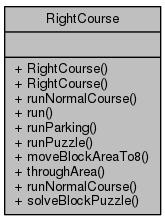
公開メンバ関数 | |
| RightCourse ()=default | |
| RightCourse (Controller &controller_, std::int32_t ipc) | |
| void | runNormalCourse (std::int16_t brightness) |
| void | run (std::int16_t brightness, std::int16_t black, std::int16_t white, std::int16_t gray) |
| void | runParking (std::int16_t brightness, LineTracerWalker lineTracer, std::int16_t black, std::int16_t white) |
| void | runPuzzle (std::int16_t target_brightness) |
| void | moveBlockAreaTo8 (std::int16_t target_brightness) |
| void | throughArea () |
| void | runNormalCourse (std::int16_t brightness, std::int16_t black, std::int16_t white, std::int16_t gray) |
| void | solveBlockPuzzle (std::int16_t brightness) |
Rコースを走らせるときに呼び出されるクラス
RightCourse.h の 21 行目に定義があります。
|
default |
コンストラクタ。センサ類の初期化を行う
|
inlineexplicit |
RightCourse.h の 25 行目に定義があります。
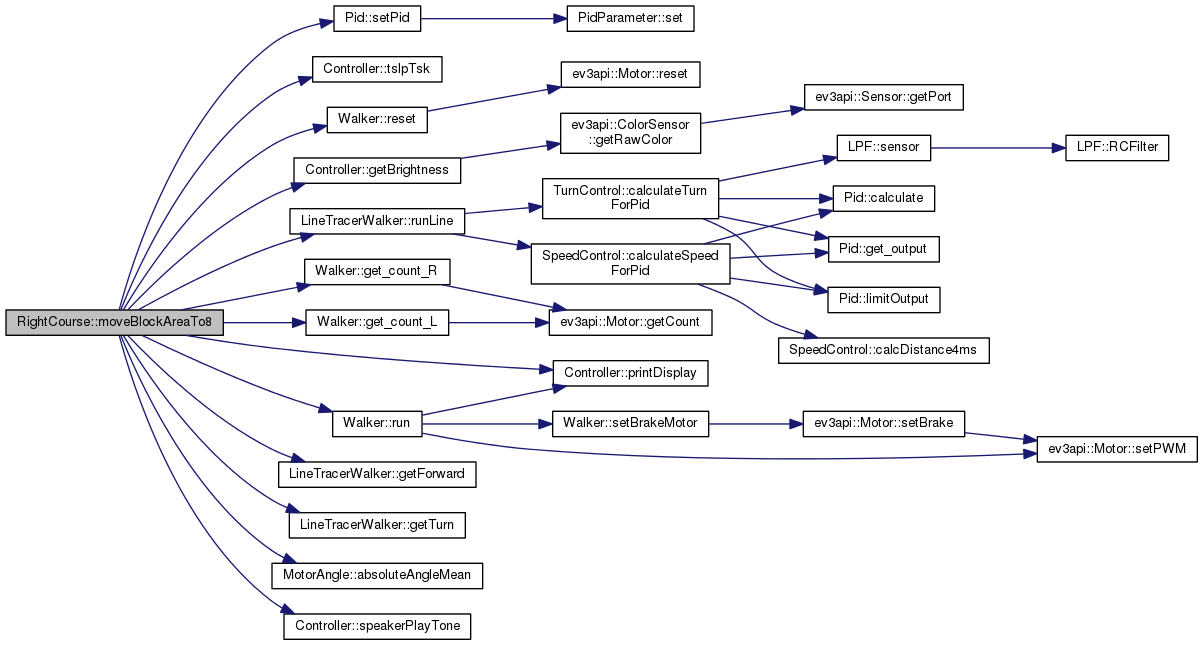
| void RightCourse::moveBlockAreaTo8 | ( | std::int16_t | target_brightness | ) |
RightCourse.cpp の 39 行目に定義があります。
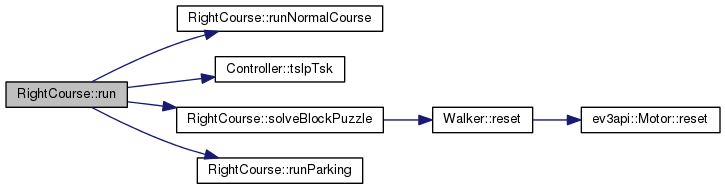
| void RightCourse::run | ( | std::int16_t | brightness, |
| std::int16_t | black, | ||
| std::int16_t | white, | ||
| std::int16_t | gray | ||
| ) |
Rコースの走行範囲の切り替えを行う
RightCourse.cpp の 15 行目に定義があります。
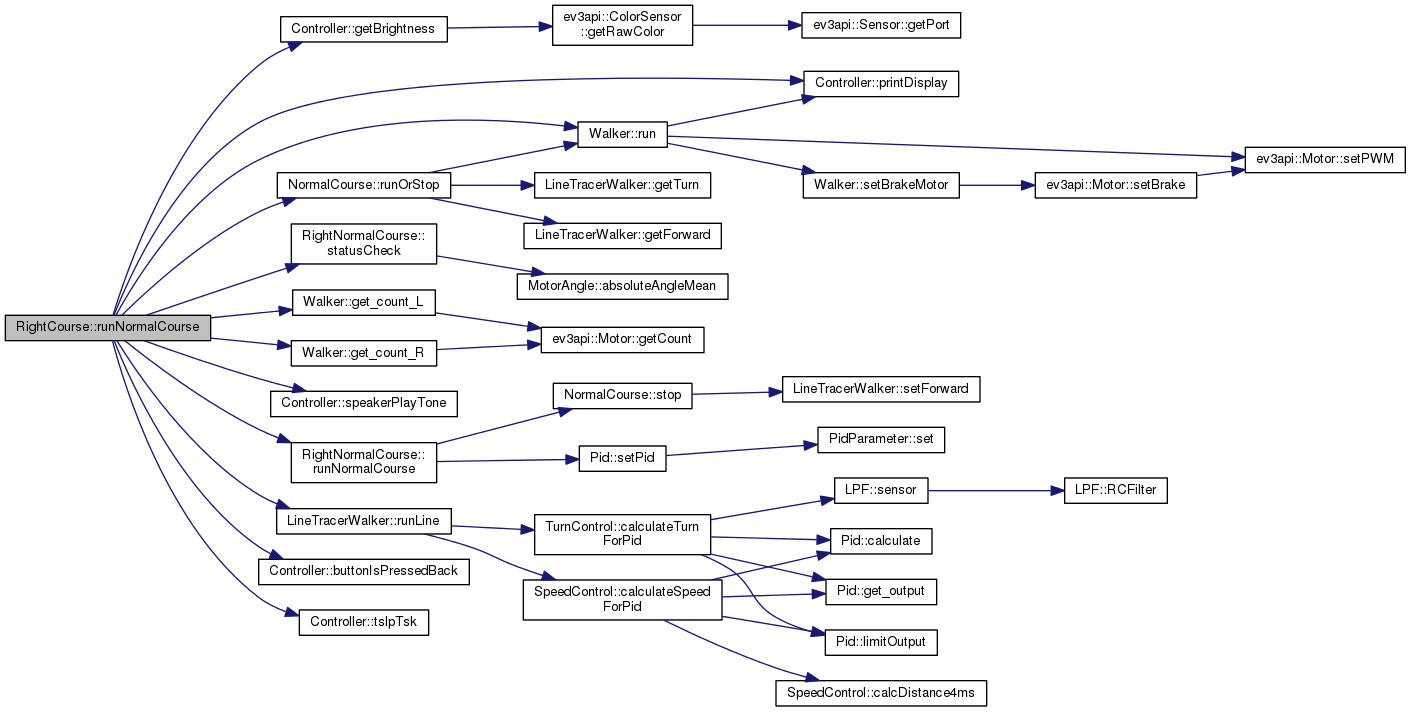
| void RightCourse::runNormalCourse | ( | std::int16_t | brightness | ) |
各エリアの処理を呼び出す NormalCourseエリアの処理

| void RightCourse::runNormalCourse | ( | std::int16_t | brightness, |
| std::int16_t | black, | ||
| std::int16_t | white, | ||
| std::int16_t | gray | ||
| ) |
RightCourse.cpp の 102 行目に定義があります。
| void RightCourse::runParking | ( | std::int16_t | brightness, |
| LineTracerWalker | lineTracer, | ||
| std::int16_t | black, | ||
| std::int16_t | white | ||
| ) |
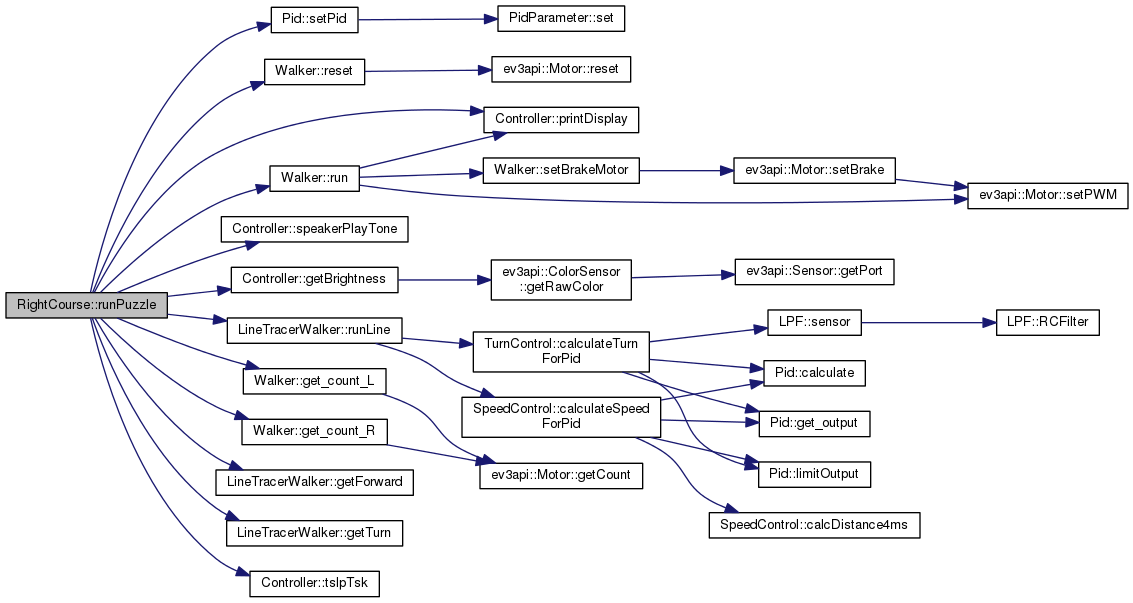
| void RightCourse::runPuzzle | ( | std::int16_t | target_brightness | ) |
RightCourse.cpp の 68 行目に定義があります。
| void RightCourse::solveBlockPuzzle | ( | std::int16_t | brightness | ) |
| void RightCourse::throughArea | ( | ) |
RightCourse.cpp の 91 行目に定義があります。

 1.8.6
1.8.6




