|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <RightNormalCourse.h>
公開メンバ関数 | |
| RightNormalCourse () | |
| bool | runNormalCourse (int16_t target_brightness, int16_t black, int16_t white, int16_t gray) |
| bool | statusCheck (int32_t countL, int32_t countR) |
| int | getStatus () |
 基底クラス NormalCourse に属する継承公開メンバ関数 基底クラス NormalCourse に属する継承公開メンバ関数 | |
| NormalCourse () | |
| void | stop () |
| void | runOrStop (Walker &walker) |
その他の継承メンバ | |
| 基底クラス NormalCourse に属する継承公開変数類 | |
| LineTracerWalker | lineTracerWalker |
| 基底クラス NormalCourse に属する継承限定公開変数類 | |
| MotorAngle | motor_angle |
| int8_t | forward |
| int8_t | turn |
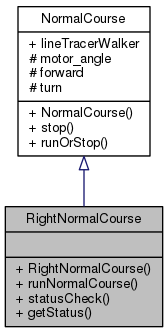
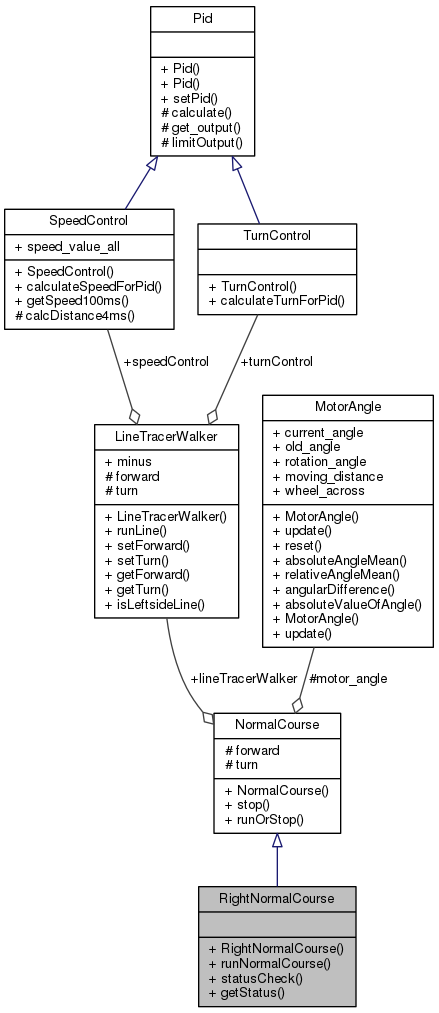
RコースのNormalCourseの処理を行うクラス
RightNormalCourse.h の 31 行目に定義があります。
| RightNormalCourse::RightNormalCourse | ( | ) |
| int RightNormalCourse::getStatus | ( | ) |
| bool RightNormalCourse::runNormalCourse | ( | int16_t | target_brightness, |
| int16_t | black, | ||
| int16_t | white, | ||
| int16_t | gray | ||
| ) |
走行場所でのPID値を設定する
RightNormalCourse.cpp の 20 行目に定義があります。

| bool RightNormalCourse::statusCheck | ( | int32_t | countL, |
| int32_t | countR | ||
| ) |
現在の走行場所の状態を設定する
| [in] | countL | 左タイヤの回転角 |
| [in] | countR | 右タイヤの回転角 |
RightNormalCourse.cpp の 81 行目に定義があります。

 1.8.6
1.8.6


