|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <Walker.h>
公開メンバ関数 | |
| Walker ()=default | |
| Walker (Controller &controller_) | |
| void | stop () |
| void | run (std::int8_t pwm, std::int8_t turn) |
| int | edgeChange () |
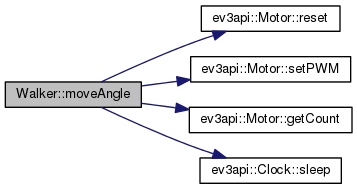
| void | moveAngle (std::int8_t pwm, int angle) |
| void | angleChange (int angle, int rotation) |
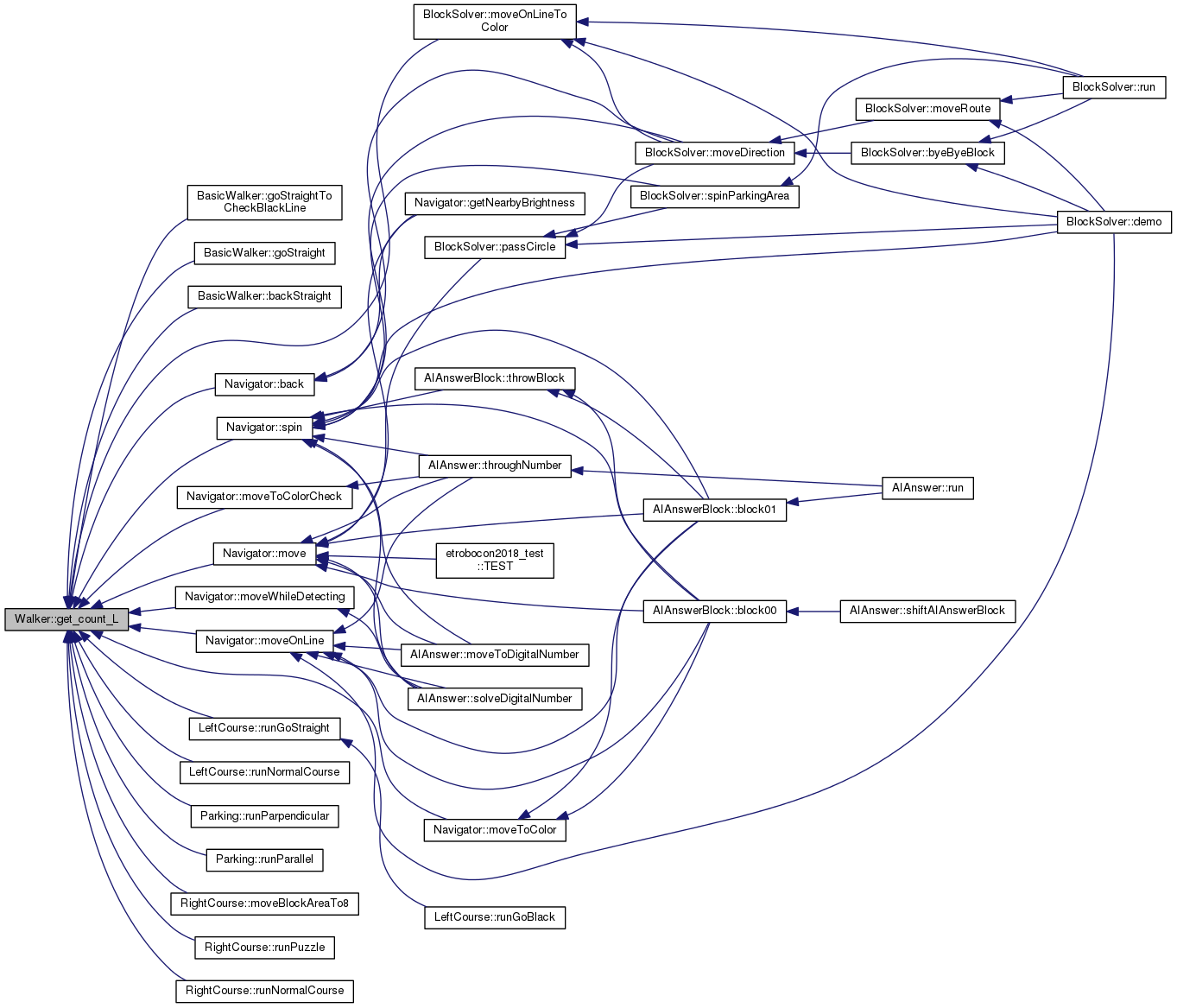
| std::int32_t | get_count_L () |
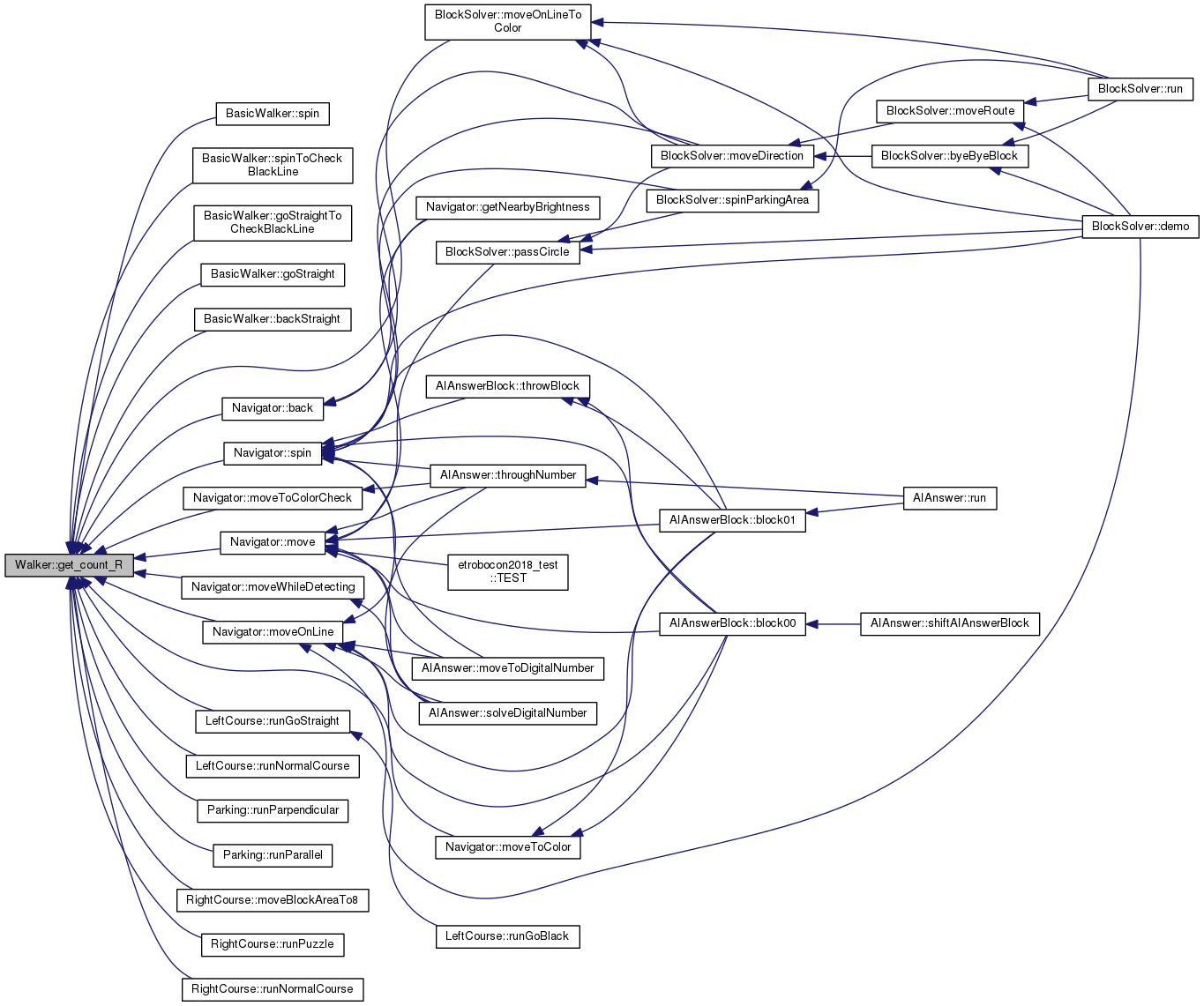
| std::int32_t | get_count_R () |
| void | init () |
| void | terminate () |
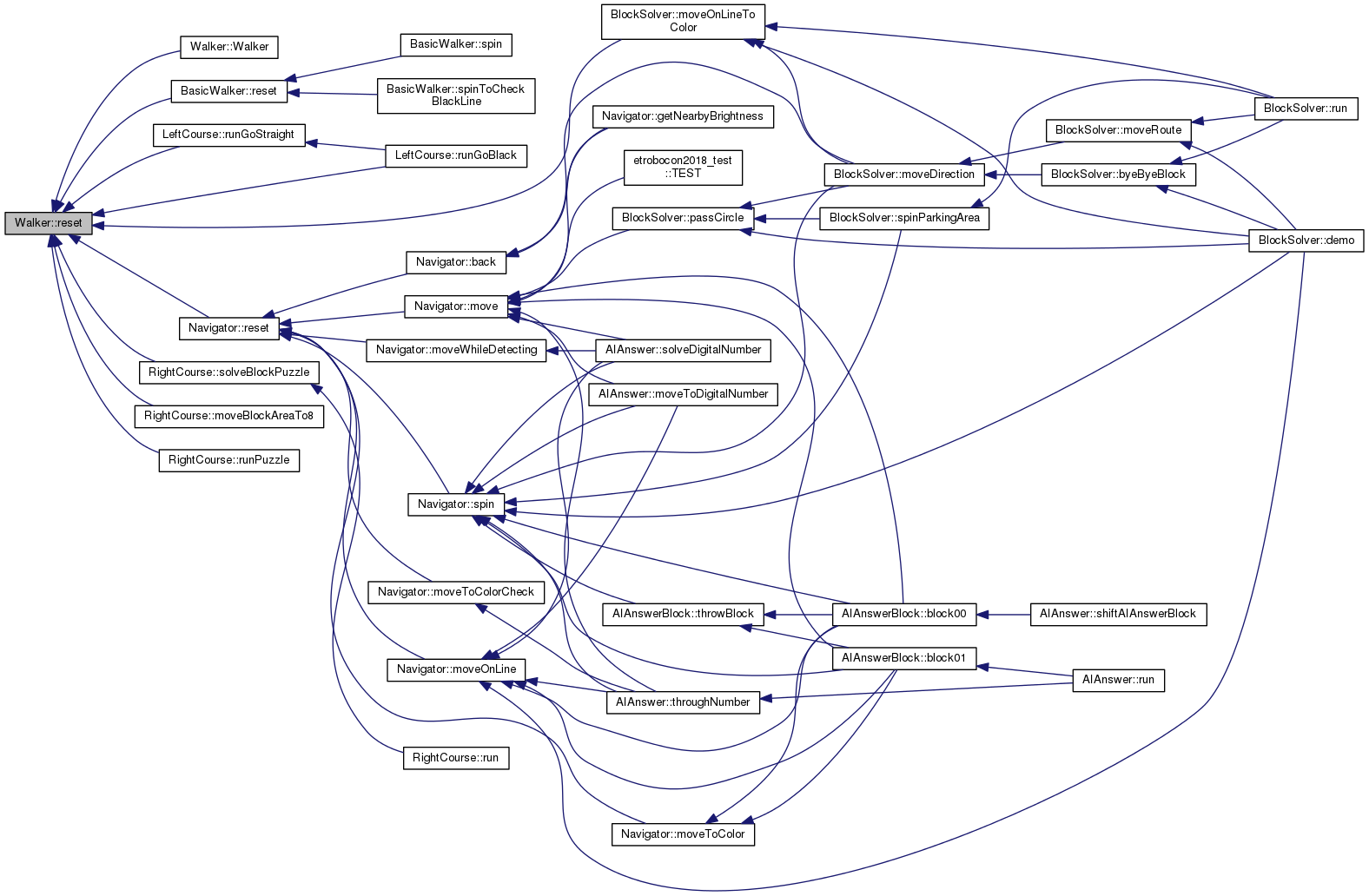
| void | reset () |
| void | setBrakeMotor (bool brake) |
|
default |
|
inlineexplicit |

| void Walker::angleChange | ( | int | angle, |
| int | rotation | ||
| ) |
| int Walker::edgeChange | ( | ) |
| std::int32_t Walker::get_count_L | ( | ) |
| std::int32_t Walker::get_count_R | ( | ) |
| void Walker::init | ( | ) |
Walker.cpp の 3 行目に定義があります。
| void Walker::moveAngle | ( | std::int8_t | pwm, |
| int | angle | ||
| ) |
| void Walker::reset | ( | void | ) |
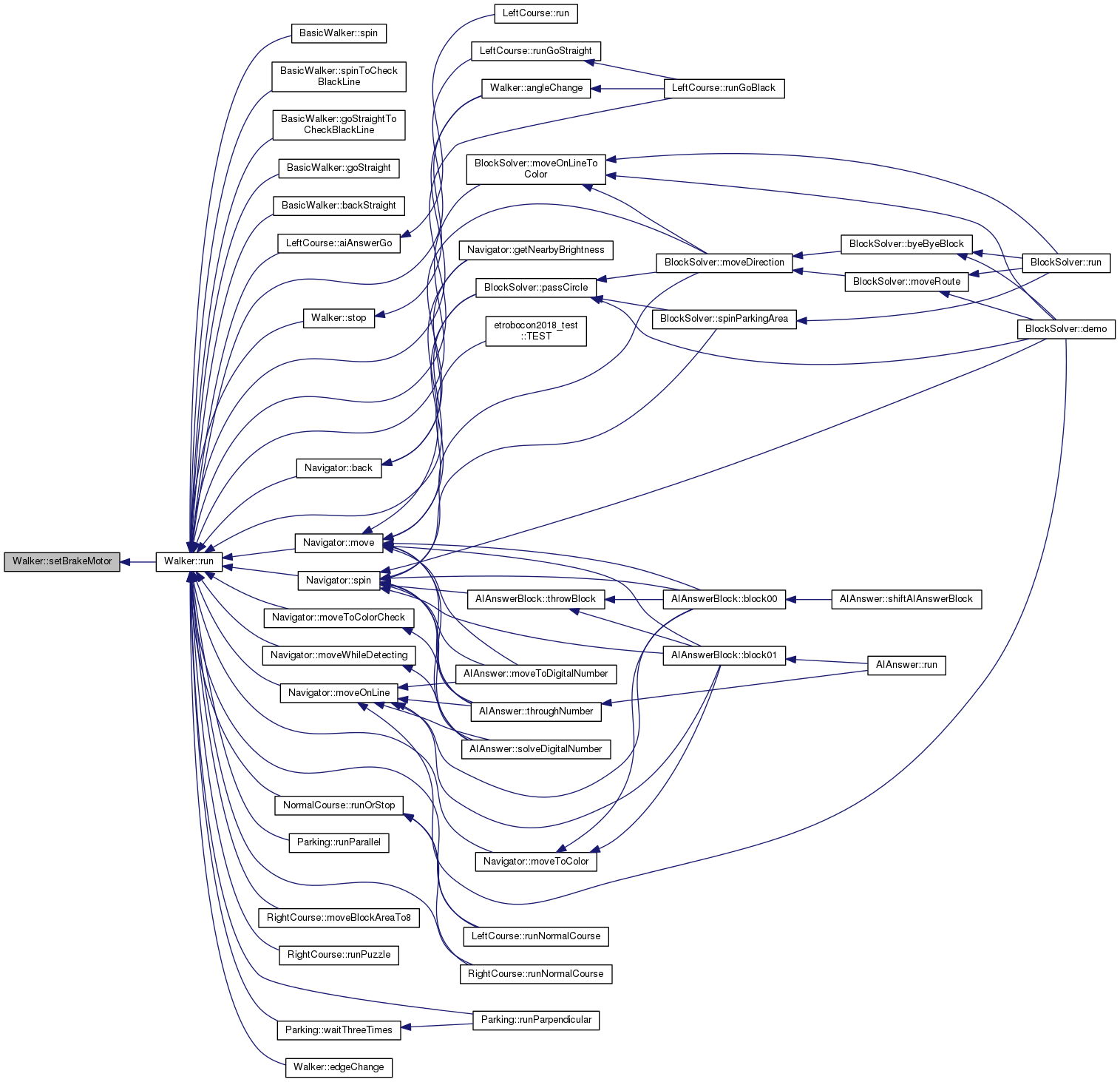
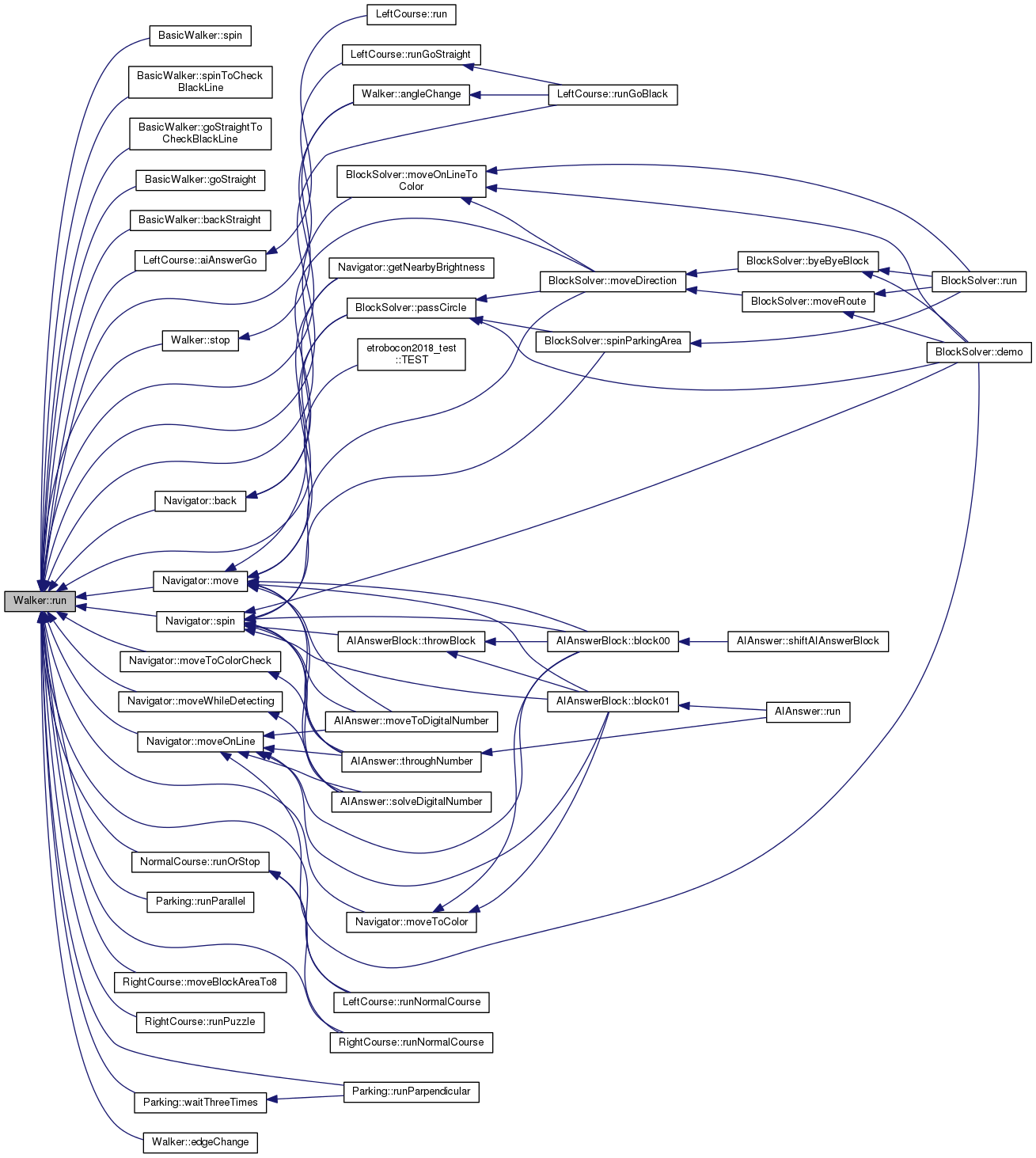
| void Walker::run | ( | std::int8_t | pwm, |
| std::int8_t | turn | ||
| ) |
Walker.cpp の 30 行目に定義があります。

| void Walker::setBrakeMotor | ( | bool | brake | ) |
| void Walker::stop | ( | ) |
Walker.cpp の 21 行目に定義があります。


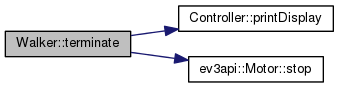
| void Walker::terminate | ( | ) |
Walker.cpp の 8 行目に定義があります。
 1.8.6
1.8.6