#include <BasicWalker.h>
|
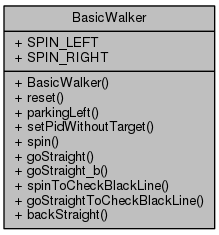
| | BasicWalker (Controller &controller_) |
| |
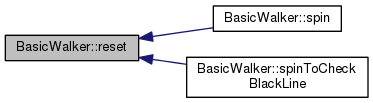
| void | reset (void) |
| |
| void | parkingLeft (void) |
| |
| void | setPidWithoutTarget (double, double, double) |
| |
| void | spin (bool, int32_t, int32_t turn=18) |
| |
| void | goStraight (int32_t, int32_t) |
| |
| void | goStraight_b (int32_t, int32_t, int16_t) |
| |
| void | spinToCheckBlackLine (bool, int32_t) |
| |
| void | goStraightToCheckBlackLine (int32_t, int32_t, int16_t) |
| |
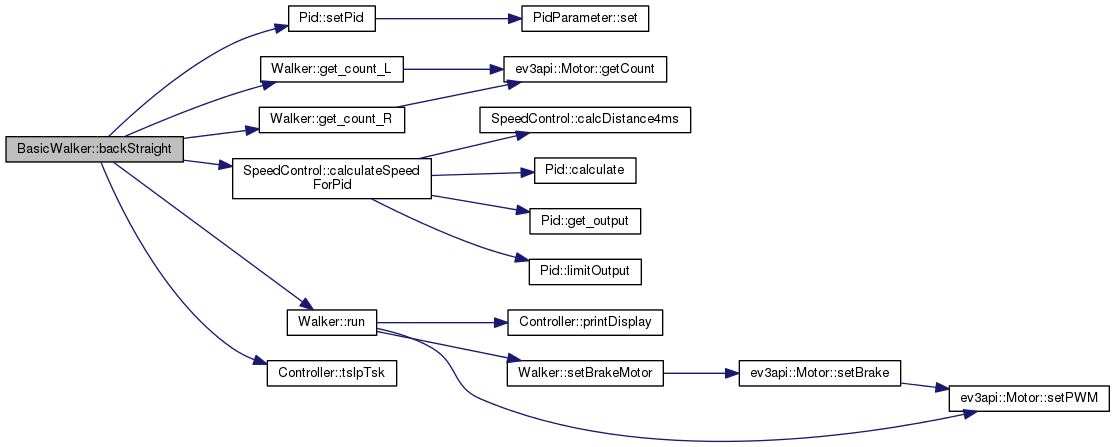
| void | backStraight (int32_t, int32_t) |
| |
BasicWalker.h の 8 行目に定義があります。
| BasicWalker::BasicWalker |
( |
Controller & |
controller_ | ) |
|
|
inlineexplicit |
BasicWalker.h の 10 行目に定義があります。
10 : controller(controller_)
void speakerSetVolume(uint8_t volume)
| void BasicWalker::backStraight |
( |
int32_t |
target_forward, |
|
|
int32_t |
distance |
|
) |
| |
BasicWalker.cpp の 85 行目に定義があります。
87 speedControl.
setPid(p_value, i_value, d_value, -target_forward);
90 walker.
run(forward, 0);
void tslpTsk(int16_t time)
std::int32_t calculateSpeedForPid(std::int32_t curAngleL, std::int32_t curAngleR)
void setPid(double p_gain_, double i_gain_, double d_gain_, double target_)
void run(std::int8_t pwm, std::int8_t turn)
std::int32_t get_count_R()
std::int32_t get_count_L()
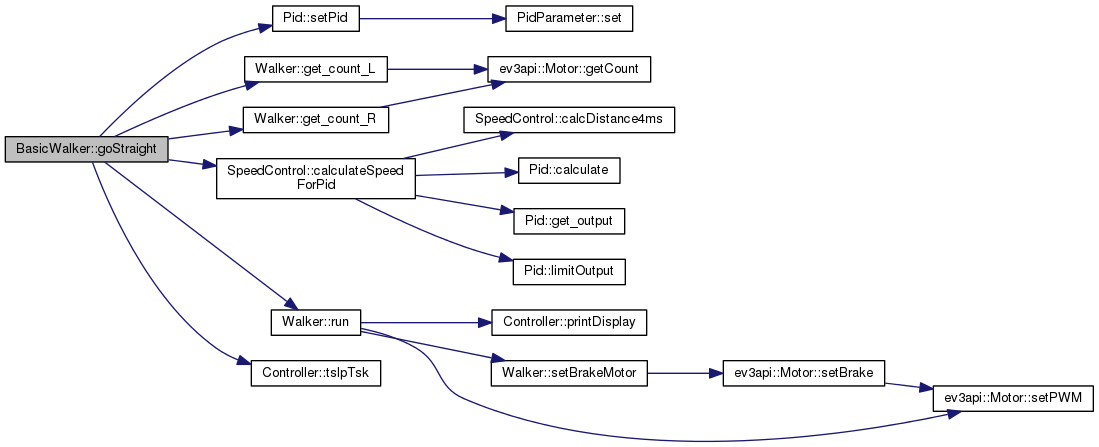
| void BasicWalker::goStraight |
( |
int32_t |
target_forward, |
|
|
int32_t |
distance |
|
) |
| |
BasicWalker.cpp の 68 行目に定義があります。
70 speedControl.
setPid(p_value, i_value, d_value, target_forward);
73 walker.
run(forward, 0);
void tslpTsk(int16_t time)
std::int32_t calculateSpeedForPid(std::int32_t curAngleL, std::int32_t curAngleR)
void setPid(double p_gain_, double i_gain_, double d_gain_, double target_)
void run(std::int8_t pwm, std::int8_t turn)
std::int32_t get_count_R()
std::int32_t get_count_L()
| void BasicWalker::goStraight_b |
( |
int32_t |
, |
|
|
int32_t |
, |
|
|
int16_t |
|
|
) |
| |
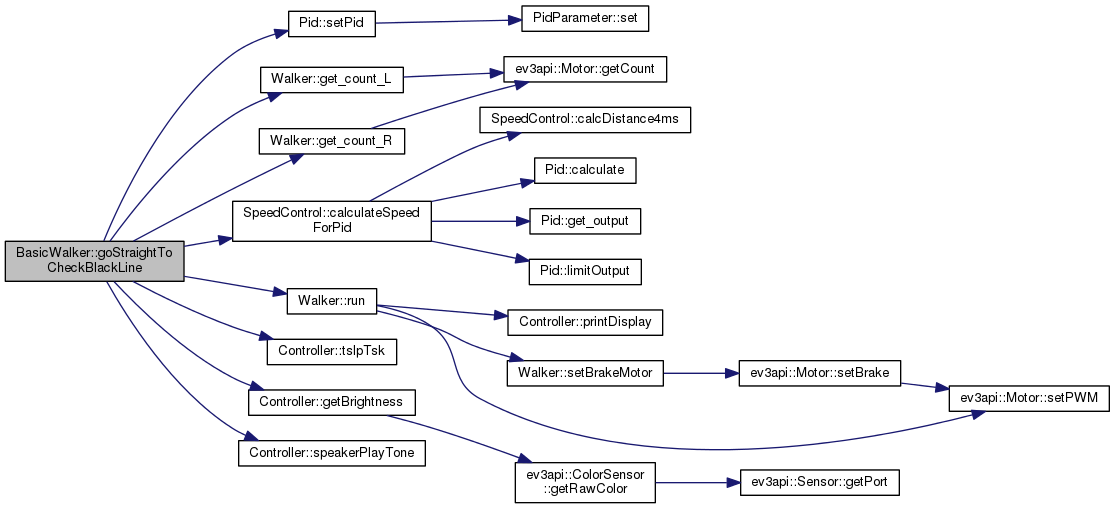
| void BasicWalker::goStraightToCheckBlackLine |
( |
int32_t |
target_forward, |
|
|
int32_t |
distance, |
|
|
int16_t |
target_brightness |
|
) |
| |
BasicWalker.cpp の 48 行目に定義があります。
51 speedControl.
setPid(p_value, i_value, d_value, target_forward);
54 walker.
run(forward, 0);
59 if(now_brightness < 13) {
void speakerPlayTone(uint16_t frequency, int32_t duration)
void tslpTsk(int16_t time)
std::int32_t calculateSpeedForPid(std::int32_t curAngleL, std::int32_t curAngleR)
void setPid(double p_gain_, double i_gain_, double d_gain_, double target_)
void run(std::int8_t pwm, std::int8_t turn)
std::int32_t get_count_R()
std::int32_t get_count_L()
| void BasicWalker::parkingLeft |
( |
void |
| ) |
|
| void BasicWalker::reset |
( |
void |
| ) |
|
| void BasicWalker::setPidWithoutTarget |
( |
double |
valueP, |
|
|
double |
valueI, |
|
|
double |
valueD |
|
) |
| |
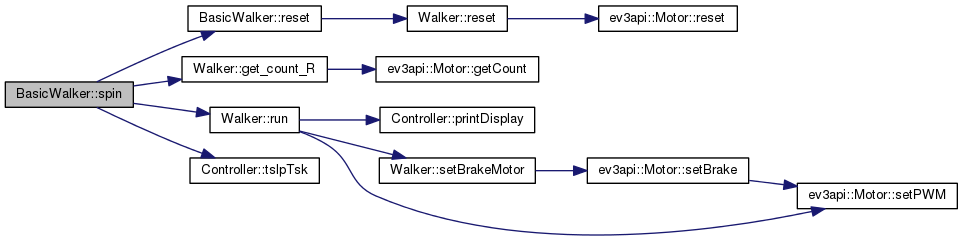
| void BasicWalker::spin |
( |
bool |
rotationalDirection, |
|
|
int32_t |
angle, |
|
|
int32_t |
turn = 18 |
|
) |
| |
BasicWalker.cpp の 15 行目に定義があります。
17 int8_t reverseValue = rotationalDirection ==
SPIN_RIGHT ? -1 : 1;
22 walker.
run(0, (turn * reverseValue));
void tslpTsk(int16_t time)
void run(std::int8_t pwm, std::int8_t turn)
std::int32_t get_count_R()
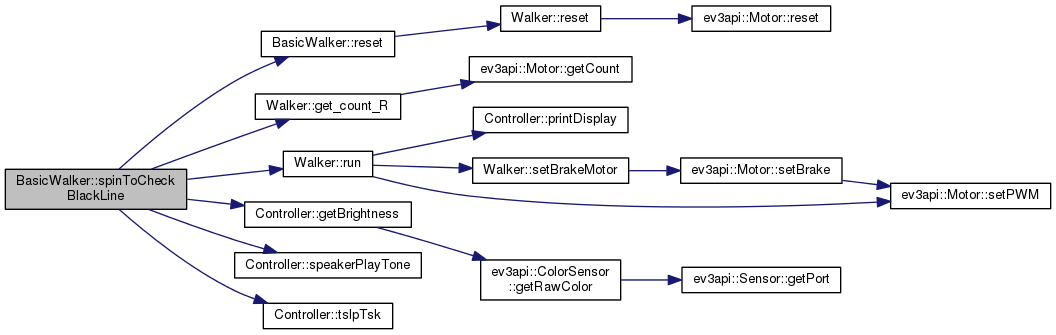
| void BasicWalker::spinToCheckBlackLine |
( |
bool |
rotationalDirection, |
|
|
int32_t |
angle |
|
) |
| |
BasicWalker.cpp の 28 行目に定義があります。
30 int8_t reverseValue = rotationalDirection ==
SPIN_RIGHT ? -1 : 1;
35 walker.
run(0, (18 * reverseValue));
38 if(now_brightness < 120) {
void speakerPlayTone(uint16_t frequency, int32_t duration)
void tslpTsk(int16_t time)
void run(std::int8_t pwm, std::int8_t turn)
std::int32_t get_count_R()
| const bool BasicWalker::SPIN_LEFT = false |
| const bool BasicWalker::SPIN_RIGHT = true |
このクラス詳解は次のファイルから抽出されました:
 1.8.6
1.8.6