|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
駐車クラス [詳解]
#include "Parking.h"
公開メンバ関数 | |
| Parking (Controller &controller_) | |
| void | runParpendicular (int16_t target_brightness, LineTracerWalker lineTracer, int16_t black, int16_t white) |
| void | runParallel (int16_t brightness, int16_t black, int16_t white, int16_t gray) |
| void | waitThreeTimes () |
| void | ev3_remaining_amount () |
|
inlineexplicit |
| void Parking::ev3_remaining_amount | ( | ) |
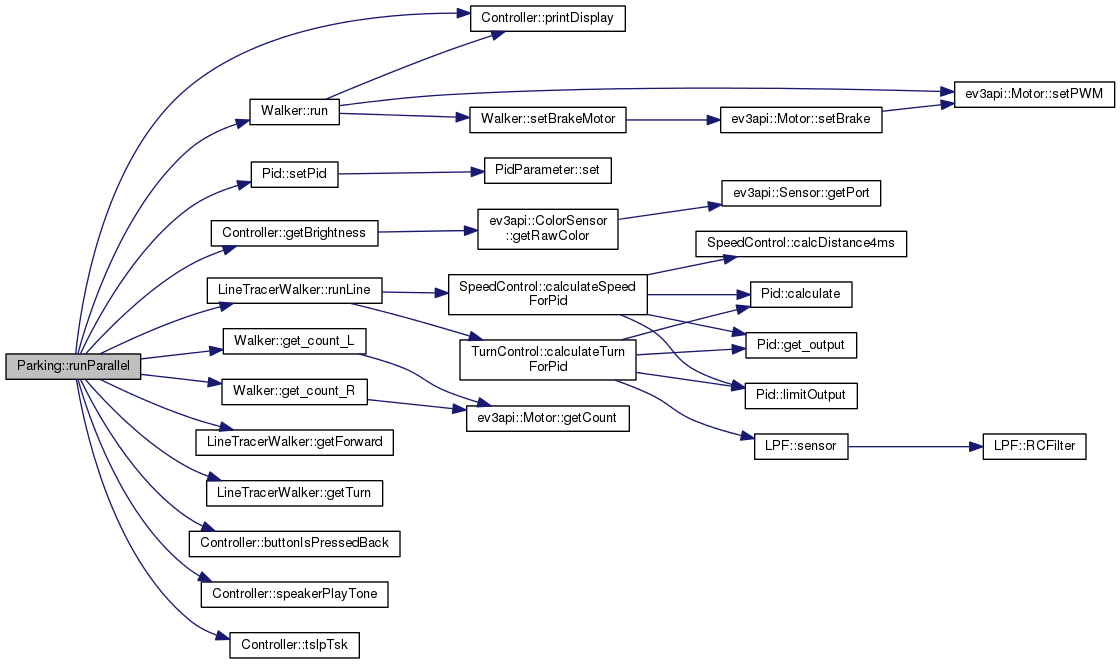
| void Parking::runParallel | ( | int16_t | brightness, |
| int16_t | black, | ||
| int16_t | white, | ||
| int16_t | gray | ||
| ) |
直角駐車を実行する。 実行開始時にBasicWalkerクラスのインスタンスを生成し、 goStraightメンバ関数とspinメンバ関数に依存する。
Parking.cpp の 57 行目に定義があります。
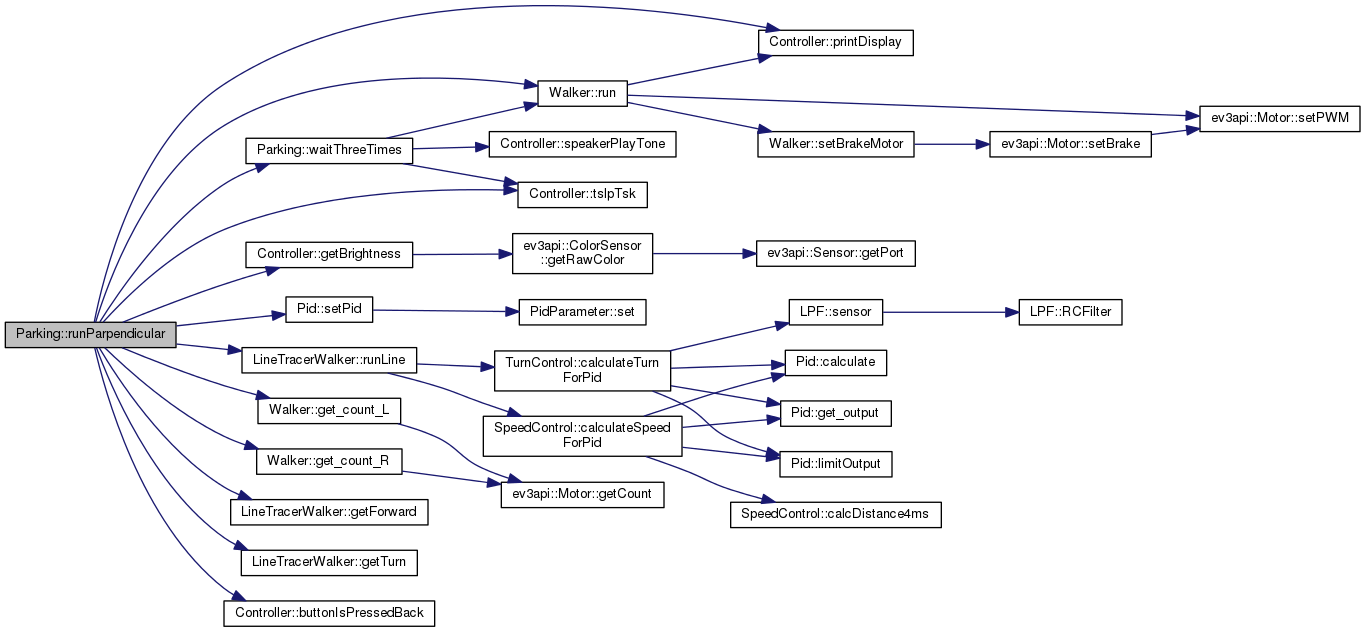
| void Parking::runParpendicular | ( | int16_t | target_brightness, |
| LineTracerWalker | lineTracer, | ||
| int16_t | black, | ||
| int16_t | white | ||
| ) |
縦列駐車を実行する。 実行開始時にBasicWalkerクラスのインスタンスを生成し、 goStraightメンバ関数とspinメンバ関数に依存する。
Parking.cpp の 9 行目に定義があります。
| void Parking::waitThreeTimes | ( | ) |
3秒間待機する。 駐車完了後に使う。 その際、1秒ごとに音を鳴らす。 EV3APIに依存する。
Parking.cpp の 123 行目に定義があります。


 1.8.6
1.8.6

