|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <LeftCourse.h>
公開メンバ関数 | |
| LeftCourse ()=default | |
| LeftCourse (Controller &controller_) | |
| void | setFirstCode (int32_t) |
| void | run (int16_t brightness, int16_t black, int16_t white, int16_t gray) |
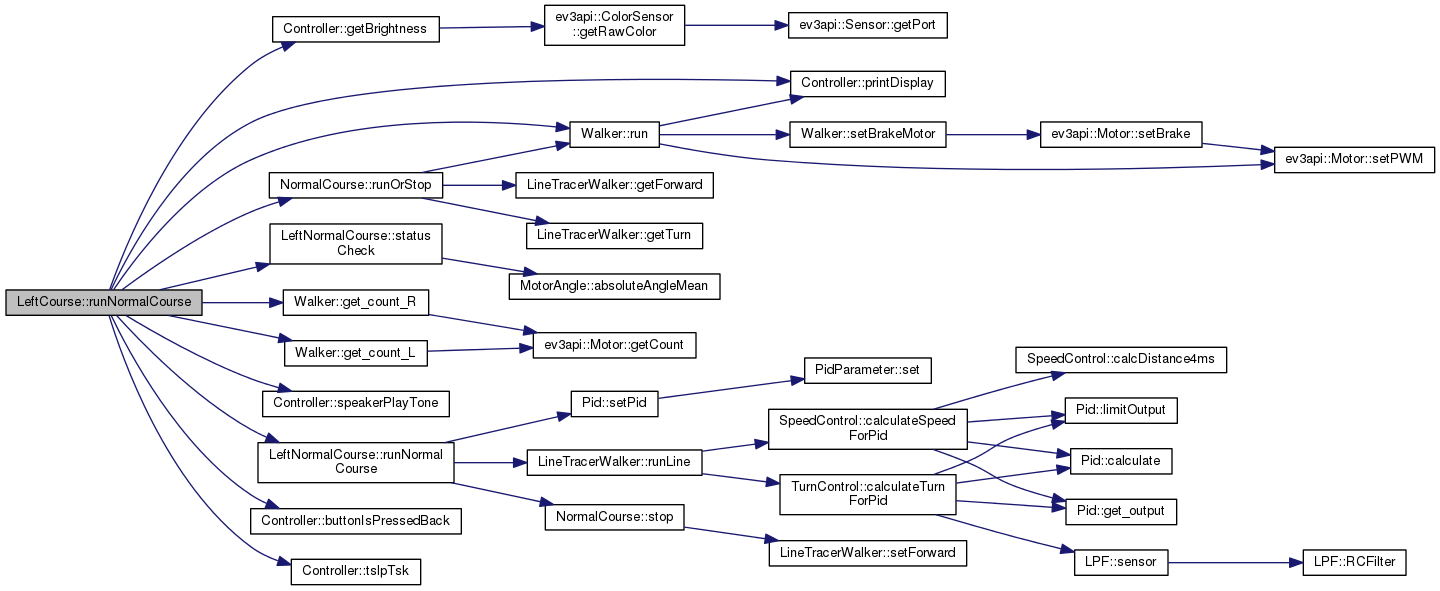
| void | runNormalCourse (int16_t brightness) |
| void | runBlockRange () |
| void | runParking (int16_t brightness, int16_t black, int16_t white, int16_t gray) |
| void | aiAnswerGo (std::int16_t brightness, std::int16_t black, std::int16_t white, std::int16_t gray) |
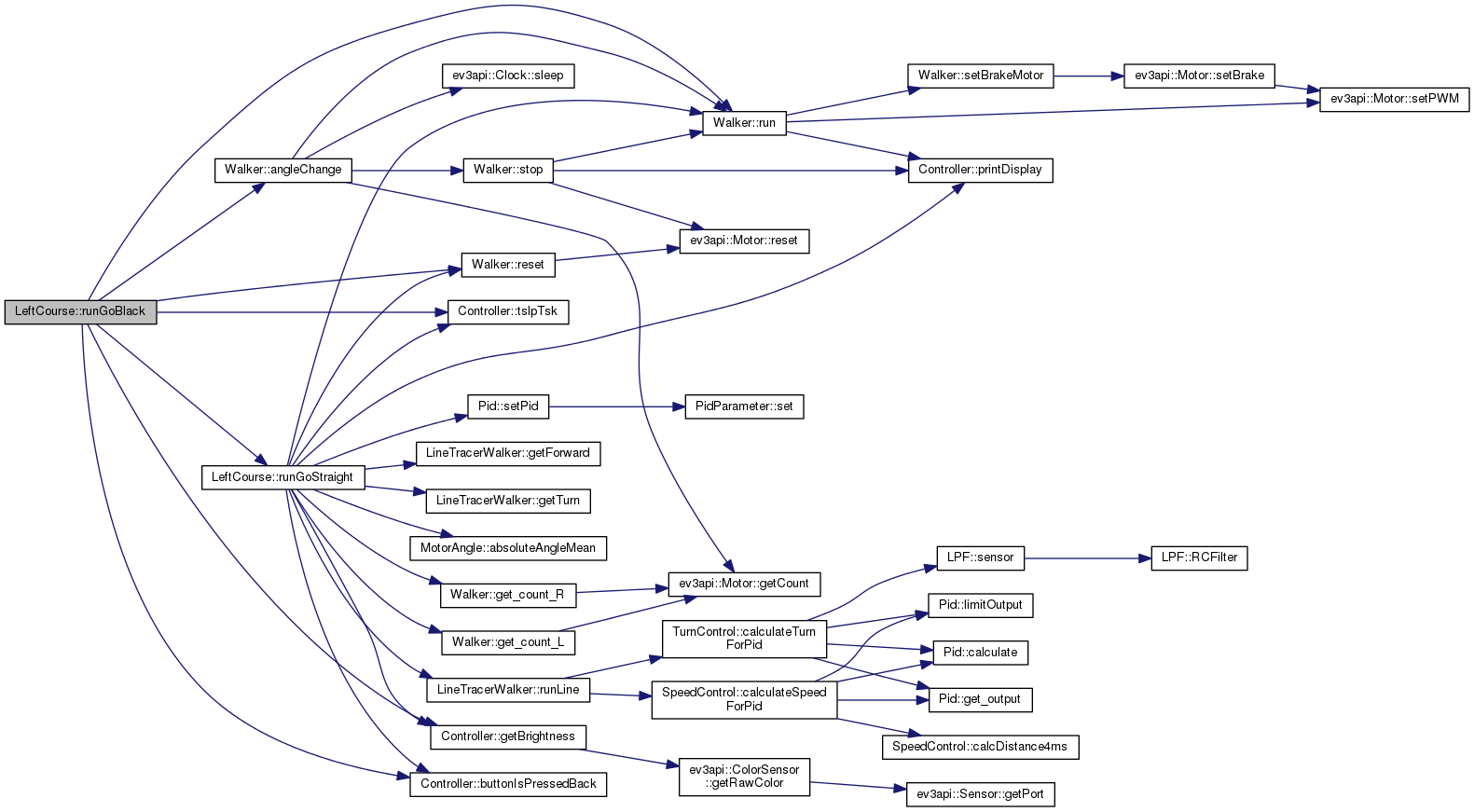
| void | runGoBlack () |
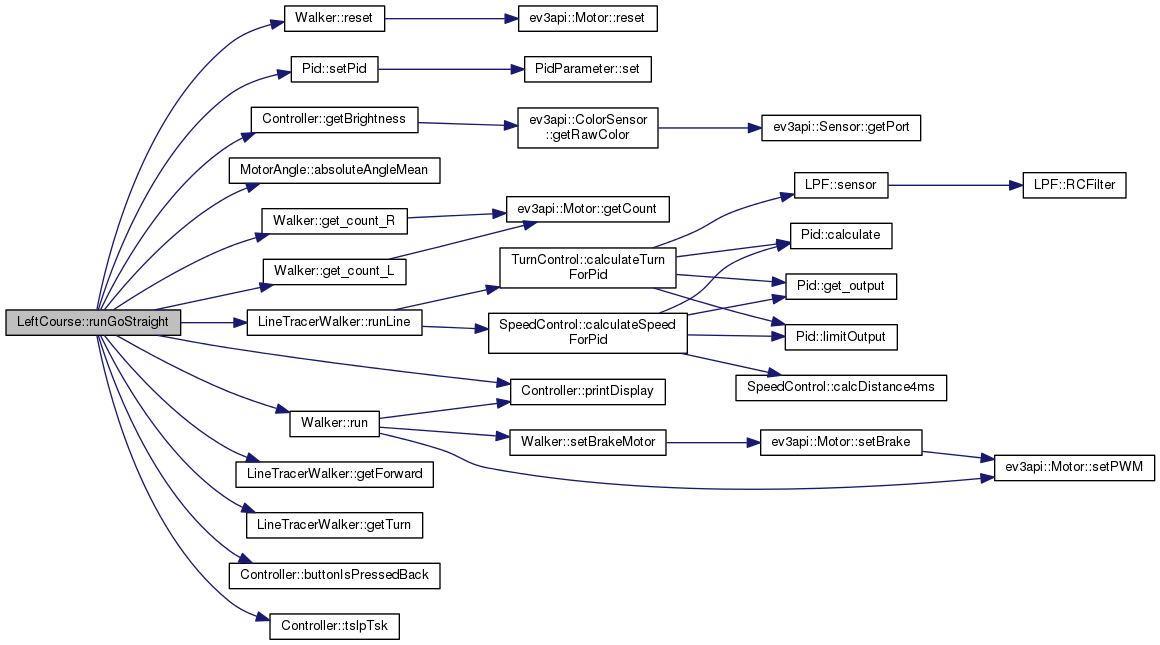
| void | runGoStraight () |
Lコースを走らせるときに呼び出されるクラス
LeftCourse.h の 22 行目に定義があります。
|
default |
コンストラクタ。センサ類の初期化を行う
|
inlineexplicit |
LeftCourse.h の 26 行目に定義があります。
| void LeftCourse::aiAnswerGo | ( | std::int16_t | brightness, |
| std::int16_t | black, | ||
| std::int16_t | white, | ||
| std::int16_t | gray | ||
| ) |
| void LeftCourse::run | ( | int16_t | brightness, |
| int16_t | black, | ||
| int16_t | white, | ||
| int16_t | gray | ||
| ) |
各エリアの処理を呼び出す
Lコースの走行範囲の切り替えを行う
LeftCourse.cpp の 16 行目に定義があります。

| void LeftCourse::runBlockRange | ( | ) |
| void LeftCourse::runGoBlack | ( | ) |
| void LeftCourse::runGoStraight | ( | ) |
LeftCourse.cpp の 65 行目に定義があります。

| void LeftCourse::runNormalCourse | ( | int16_t | brightness | ) |
NormalCourseエリアの処理
LeftCourse.cpp の 103 行目に定義があります。
| void LeftCourse::runParking | ( | int16_t | brightness, |
| int16_t | black, | ||
| int16_t | white, | ||
| int16_t | gray | ||
| ) |
| void LeftCourse::setFirstCode | ( | int32_t | code | ) |
このクラスのインスタンスを保持しているインスタンスまたはメンバ関数が、 UserInterfaceクラスのgetFirstCodeメンバ関数から 取得した初期位置コードを入力する。
| 初期位置コード | 0から99999まで |
LeftCourse.cpp の 8 行目に定義があります。
 1.8.6
1.8.6