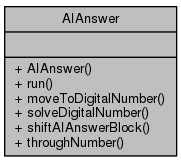
#include <AIAnswer.h>
AIAnswer.h の 14 行目に定義があります。
| AIAnswer::AIAnswer |
( |
Controller & |
controller, |
|
|
Walker & |
walker, |
|
|
std::int16_t |
white_, |
|
|
std::int16_t |
black_, |
|
|
std::int16_t |
gray_, |
|
|
std::int16_t |
brightness |
|
) |
| |
|
inline |
AIAnswer.h の 27 行目に定義があります。
29 : navigator(controller, walker),
30 ai_answer_block(controller, walker, brightness),
34 target_brightness(brightness),
| void AIAnswer::moveToDigitalNumber |
( |
| ) |
|
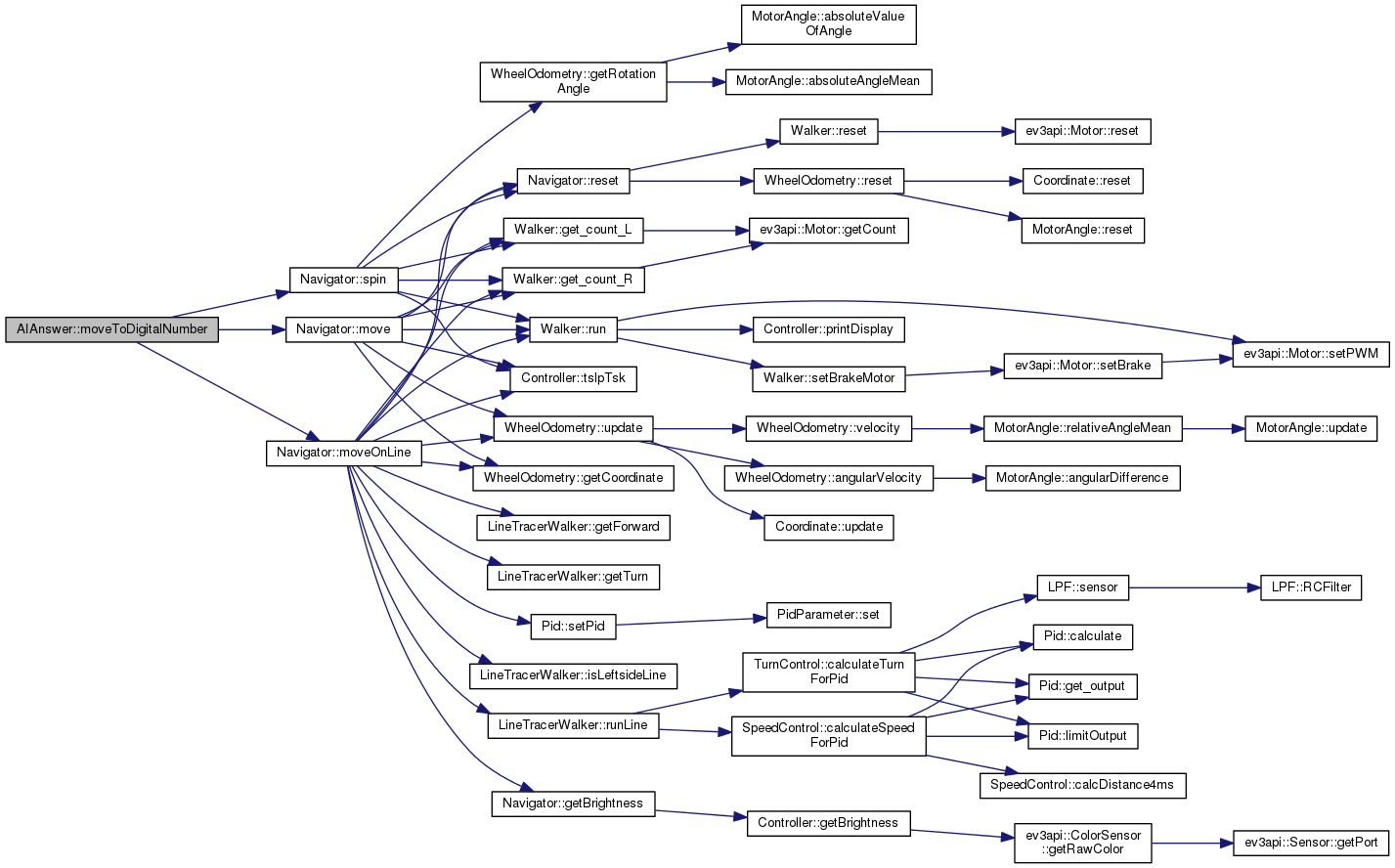
デジタル数字の場所まで行く
[AIAnswer::moveToDigitalNumber]
AIAnswer.cpp の 44 行目に定義があります。
46 navigator.
moveOnLine(100, target_brightness, 30,
true);
49 navigator.
spin(90,
false);
void moveOnLine(float distance, std::int16_t target, std::int8_t pwm=20, bool is_leftside_line=true)
指定した距離だけライントレースする
void move(float distance, std::int8_t pwm=20)
指定した距離まで走行体を移動させる
void spin(float angle, bool clockwise=false, std::int8_t pwm=10)
指定した角度まで走行体を回転させる(基本左エッジ)
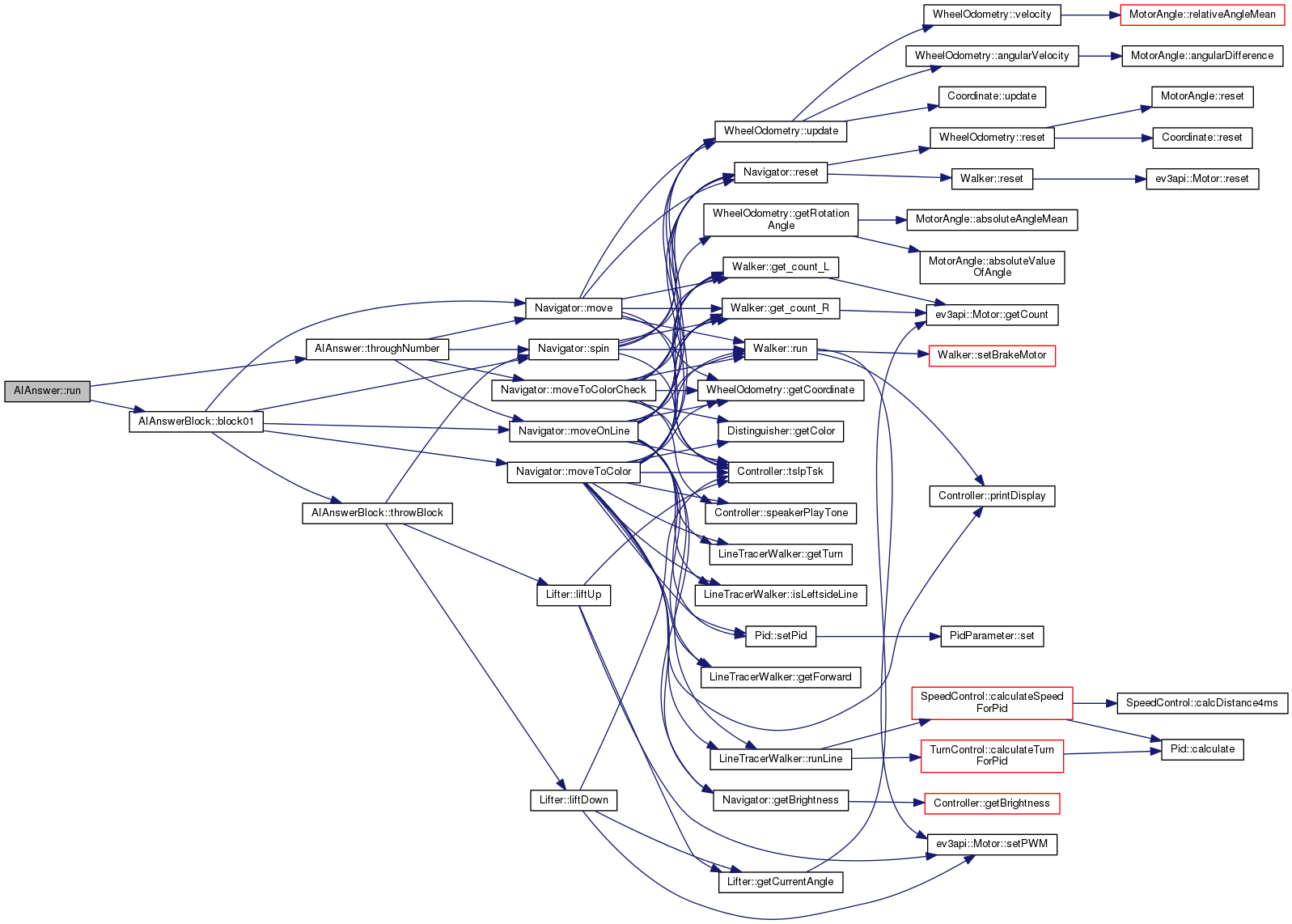
AIAnswer.cpp の 8 行目に定義があります。
void throughNumber()
数字を無視してAIアンサーのブロック並べへ行く
void block01()
アナログ数字が0,デジタル数字が1
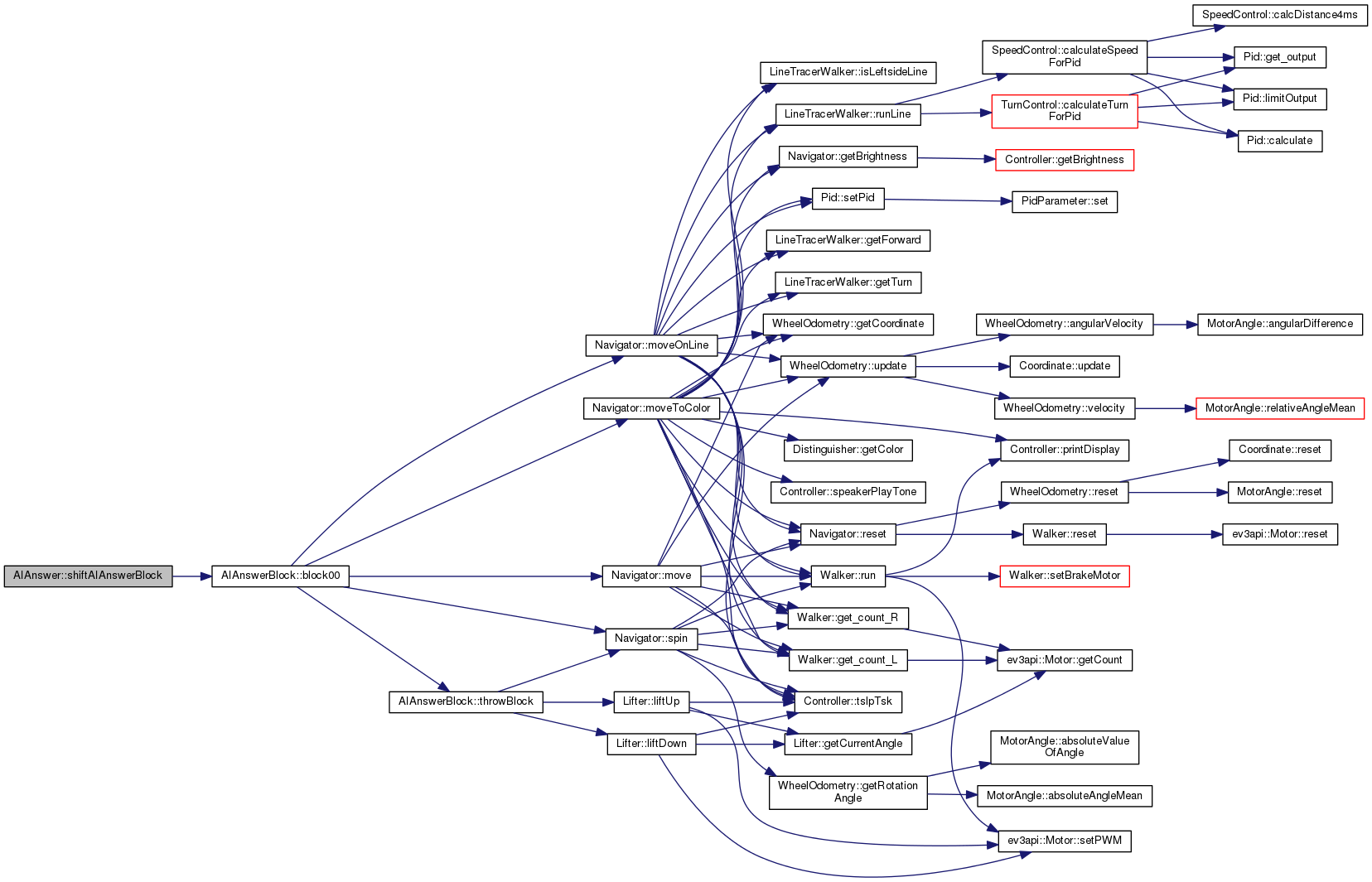
| void AIAnswer::shiftAIAnswerBlock |
( |
std::int8_t |
analog_number, |
|
|
std::int8_t |
digital_number |
|
) |
| |
数字に応じてブロックを動かす
読み取った数字に対してブロックを動かす
[AIAnswer::shiftAIAnswerBlock]
AIAnswer.cpp の 80 行目に定義があります。
83 solve_number = (analog_number * 10) + digital_number;
85 switch(solve_number) {
void block00()
アナログ数字が0,デジタル数字が0
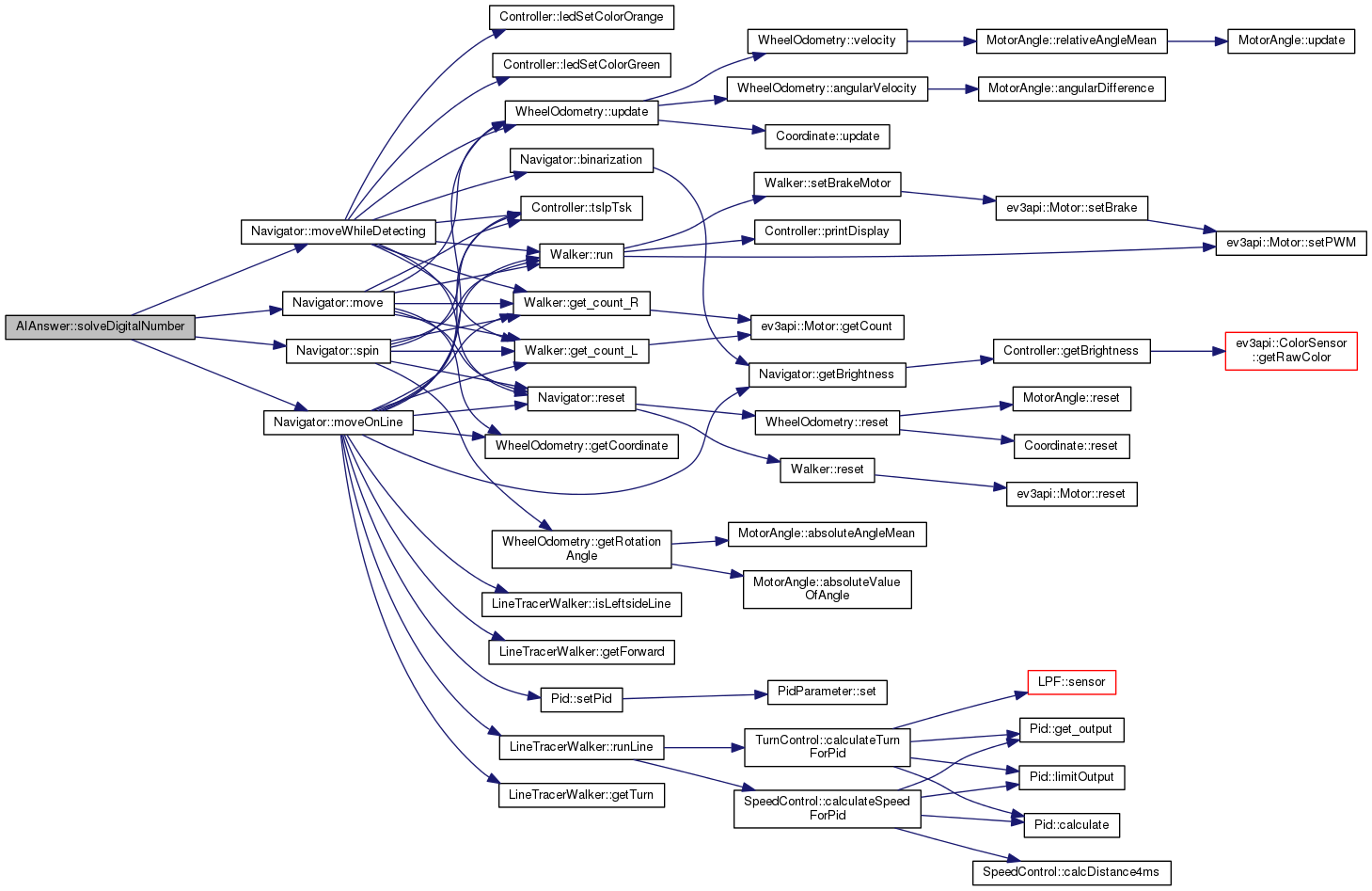
| void AIAnswer::solveDigitalNumber |
( |
| ) |
|
デジタル数字を読み取る
数字を読み取る
[AIAnswer::solveDigitalNumber]
AIAnswer.cpp の 59 行目に定義があります。
70 navigator.
spin(90,
true);
71 navigator.
moveOnLine(200, target_brightness, 30,
true);
72 navigator.
spin(90,
false);
void moveOnLine(float distance, std::int16_t target, std::int8_t pwm=20, bool is_leftside_line=true)
指定した距離だけライントレースする
void move(float distance, std::int8_t pwm=20)
指定した距離まで走行体を移動させる
void moveWhileDetecting(float distance, std::int16_t target, std::int8_t pwm=10)
指定した距離まで黒色の点を検出しながら走行体を移動させる
void spin(float angle, bool clockwise=false, std::int8_t pwm=10)
指定した角度まで走行体を回転させる(基本左エッジ)
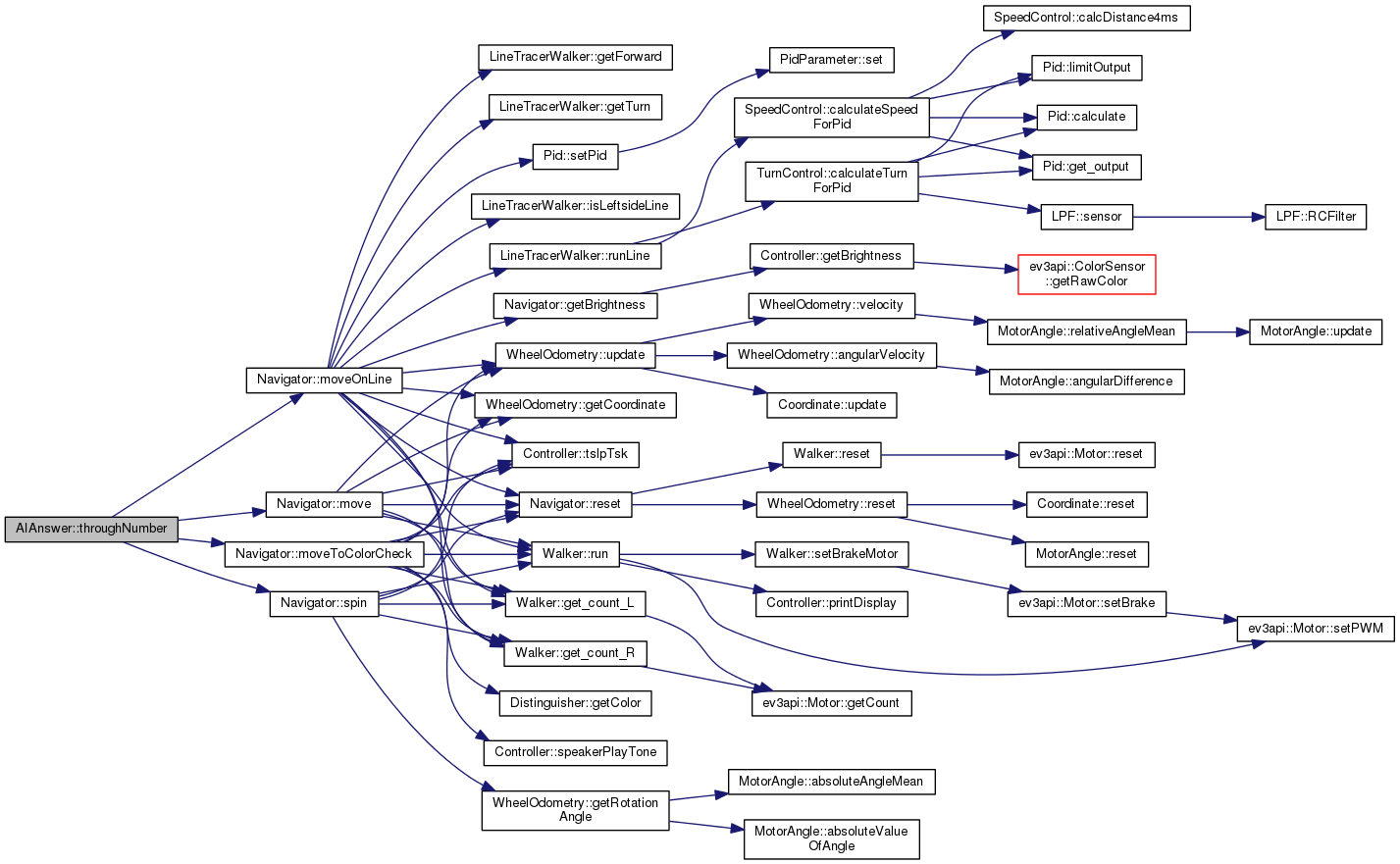
| void AIAnswer::throughNumber |
( |
| ) |
|
数字を無視してAIアンサーのブロック並べへ行く
数字を無視する
[AIAnswer::throughNumber]
AIAnswer.cpp の 25 行目に定義があります。
27 navigator.
moveOnLine(150, target_brightness, 30,
true);
30 navigator.
spin(90,
false);
34 navigator.
spin(70,
true);
37 navigator.
spin(60,
false);
void moveOnLine(float distance, std::int16_t target, std::int8_t pwm=20, bool is_leftside_line=true)
指定した距離だけライントレースする
void move(float distance, std::int8_t pwm=20)
指定した距離まで走行体を移動させる
void spin(float angle, bool clockwise=false, std::int8_t pwm=10)
指定した角度まで走行体を回転させる(基本左エッジ)
void moveToColorCheck(float distance, Color target_color, std::int8_t pwm=20)
指定した距離特定の色を探しながら進む(ライントレースしない)
このクラス詳解は次のファイルから抽出されました:
 1.8.6
1.8.6