|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <AIAnswerBlock.h>
公開メンバ関数 | |
| AIAnswerBlock (Controller &controller, Walker &walker, std::int16_t brightness) | |
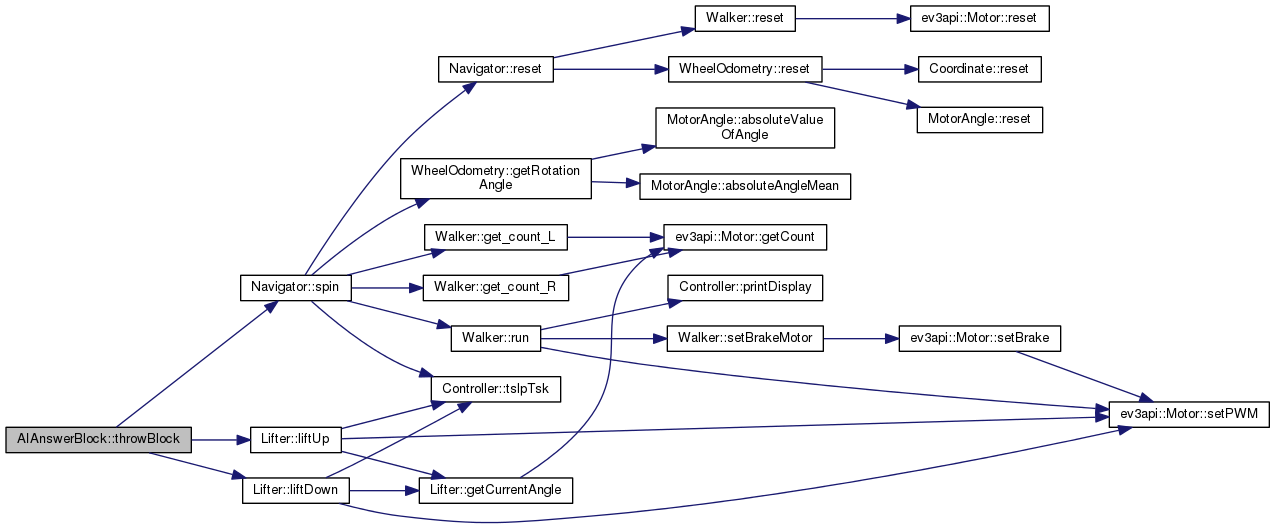
| void | throwBlock (bool angle_direction=false) |
| リフターを使ってブロックを放って後ろを向く [詳解] | |
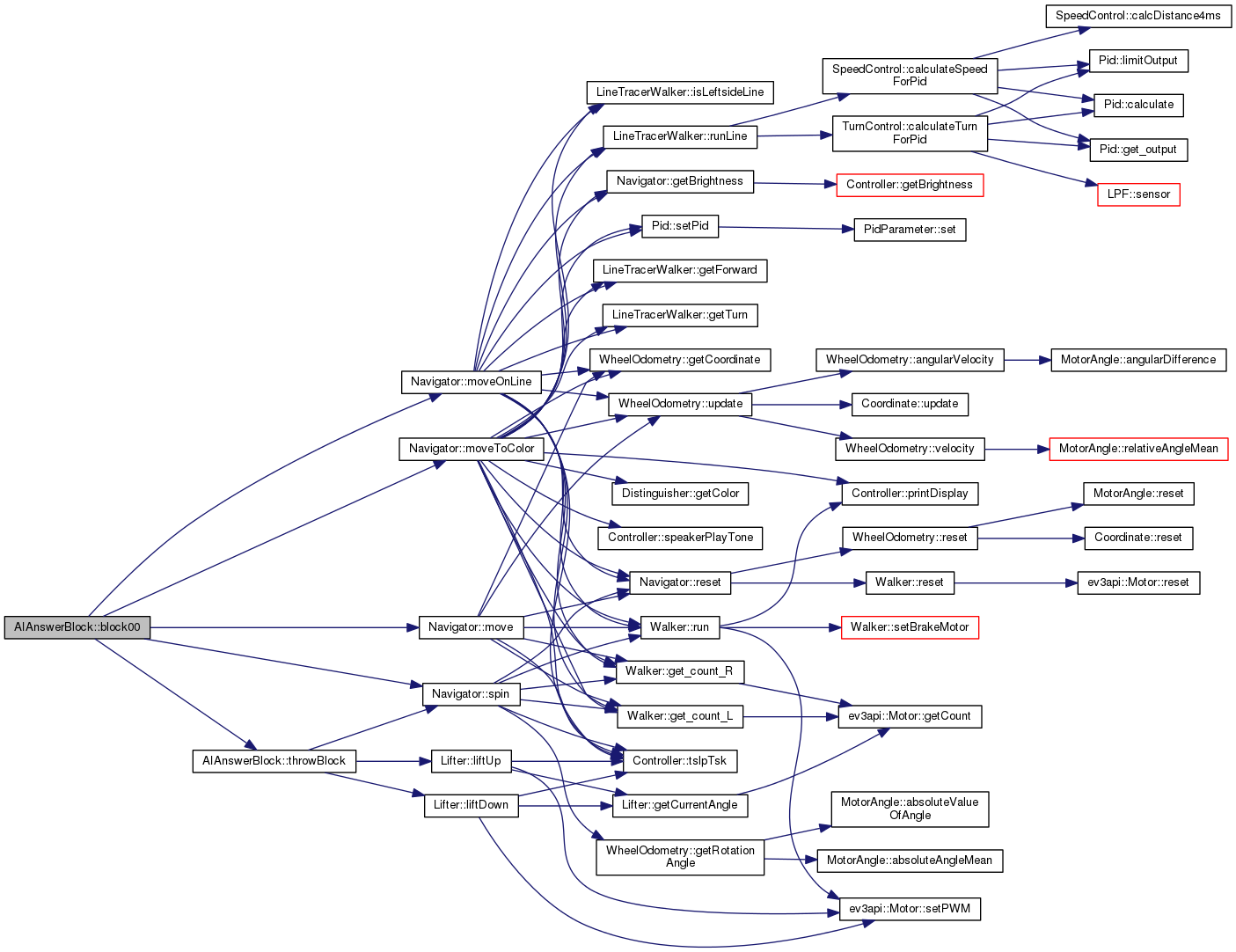
| void | block00 () |
| アナログ数字が0,デジタル数字が0 [詳解] | |
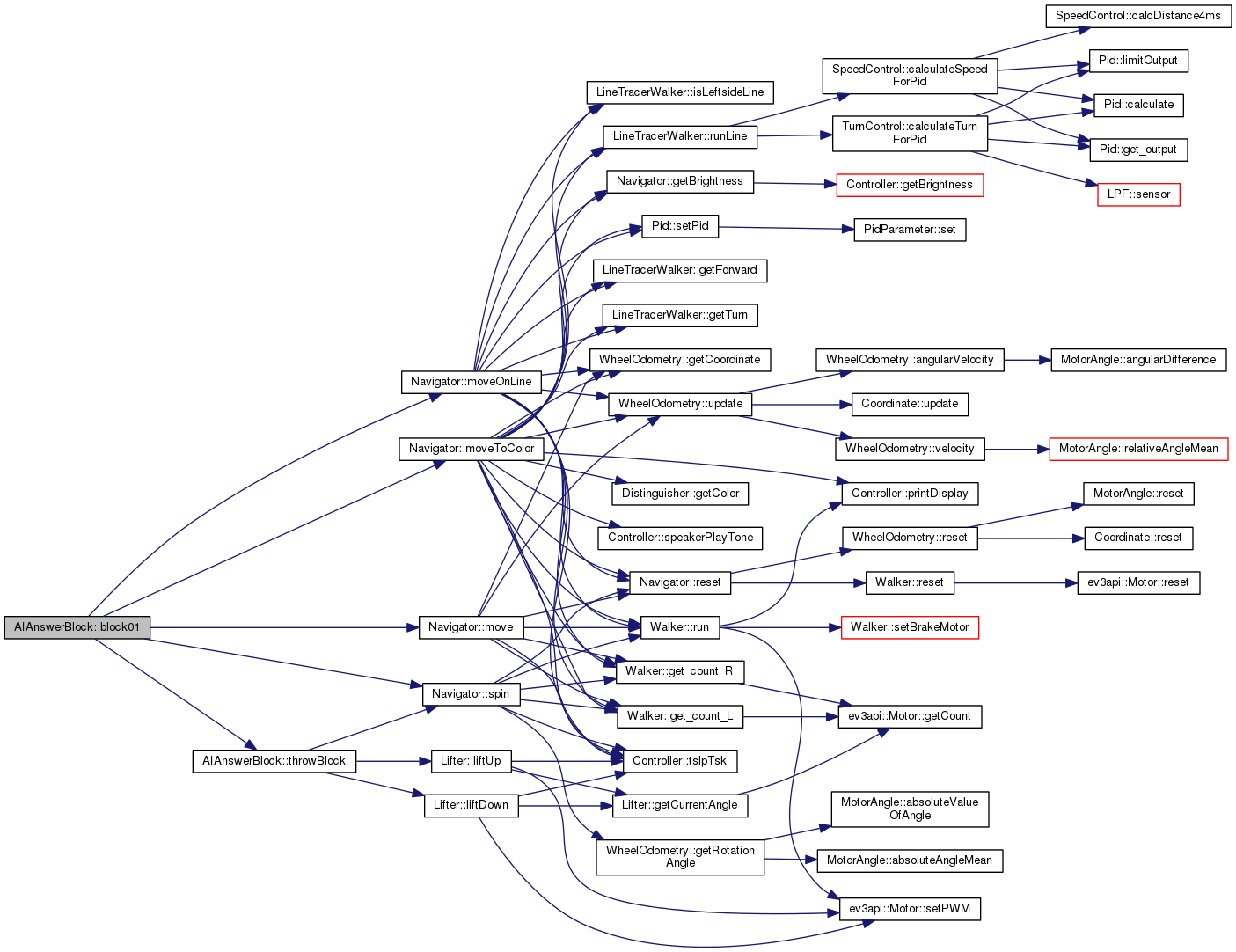
| void | block01 () |
| アナログ数字が0,デジタル数字が1 [詳解] | |
| void | block02 () |
| アナログ数字が0,デジタル数字が2 [詳解] | |
| void | block03 () |
| アナログ数字が0,デジタル数字が3 [詳解] | |
| void | block04 () |
| アナログ数字が0,デジタル数字が4 [詳解] | |
| void | block05 () |
| アナログ数字が0,デジタル数字が5 [詳解] | |
| void | block06 () |
| アナログ数字が0,デジタル数字が6 [詳解] | |
| void | block07 () |
| アナログ数字が0,デジタル数字が7 [詳解] | |
| void | block10 () |
| アナログ数字が1,デジタル数字が0 [詳解] | |
| void | block11 () |
| アナログ数字が1,デジタル数字が1 [詳解] | |
| void | block12 () |
| アナログ数字が1,デジタル数字が2 [詳解] | |
| void | block13 () |
| アナログ数字が1,デジタル数字が3 [詳解] | |
| void | block14 () |
| アナログ数字が1,デジタル数字が4 [詳解] | |
| void | block15 () |
| アナログ数字が1,デジタル数字が5 [詳解] | |
| void | block16 () |
| アナログ数字が1,デジタル数字が6 [詳解] | |
| void | block17 () |
| アナログ数字が1,デジタル数字が7 [詳解] | |
| void | block20 () |
| アナログ数字が2,デジタル数字が0 [詳解] | |
| void | block21 () |
| アナログ数字が2,デジタル数字が1 [詳解] | |
| void | block22 () |
| アナログ数字が2,デジタル数字が2 [詳解] | |
| void | block23 () |
| アナログ数字が2,デジタル数字が3 [詳解] | |
| void | block24 () |
| アナログ数字が2,デジタル数字が4 [詳解] | |
| void | block25 () |
| アナログ数字が2,デジタル数字が5 [詳解] | |
| void | block26 () |
| アナログ数字が2,デジタル数字が6 [詳解] | |
| void | block27 () |
| アナログ数字が2,デジタル数字が7 [詳解] | |
| void | block30 () |
| アナログ数字が3,デジタル数字が0 [詳解] | |
| void | block31 () |
| アナログ数字が3,デジタル数字が1 [詳解] | |
| void | block32 () |
| アナログ数字が3,デジタル数字が2 [詳解] | |
| void | block33 () |
| アナログ数字が3,デジタル数字が3 [詳解] | |
| void | block34 () |
| アナログ数字が3,デジタル数字が4 [詳解] | |
| void | block35 () |
| アナログ数字が3,デジタル数字が5 [詳解] | |
| void | block36 () |
| アナログ数字が3,デジタル数字が6 [詳解] | |
| void | block37 () |
| アナログ数字が3,デジタル数字が7 [詳解] | |
| void | block40 () |
| アナログ数字が4,デジタル数字が0 [詳解] | |
| void | block41 () |
| アナログ数字が4,デジタル数字が1 [詳解] | |
| void | block42 () |
| アナログ数字が4,デジタル数字が2 [詳解] | |
| void | block43 () |
| アナログ数字が4,デジタル数字が3 [詳解] | |
| void | block44 () |
| アナログ数字が4,デジタル数字が4 [詳解] | |
| void | block45 () |
| アナログ数字が4,デジタル数字が5 [詳解] | |
| void | block46 () |
| アナログ数字が4,デジタル数字が6 [詳解] | |
| void | block47 () |
| アナログ数字が4,デジタル数字が7 [詳解] | |
| void | block50 () |
| アナログ数字が5,デジタル数字が0 [詳解] | |
| void | block51 () |
| アナログ数字が5,デジタル数字が1 [詳解] | |
| void | block52 () |
| アナログ数字が5,デジタル数字が2 [詳解] | |
| void | block53 () |
| アナログ数字が5,デジタル数字が3 [詳解] | |
| void | block54 () |
| アナログ数字が5,デジタル数字が4 [詳解] | |
| void | block55 () |
| アナログ数字が5,デジタル数字が5 [詳解] | |
| void | block56 () |
| アナログ数字が5,デジタル数字が6 [詳解] | |
| void | block57 () |
| アナログ数字が5,デジタル数字が7 [詳解] | |
| void | block60 () |
| アナログ数字が6,デジタル数字が0 [詳解] | |
| void | block61 () |
| アナログ数字が6,デジタル数字が1 [詳解] | |
| void | block62 () |
| アナログ数字が6,デジタル数字が2 [詳解] | |
| void | block63 () |
| アナログ数字が6,デジタル数字が3 [詳解] | |
| void | block64 () |
| アナログ数字が6,デジタル数字が4 [詳解] | |
| void | block65 () |
| アナログ数字が6,デジタル数字が5 [詳解] | |
| void | block66 () |
| アナログ数字が6,デジタル数字が6 [詳解] | |
| void | block67 () |
| アナログ数字が6,デジタル数字が7 [詳解] | |
| void | block70 () |
| アナログ数字が7,デジタル数字が0 [詳解] | |
| void | block71 () |
| アナログ数字が7,デジタル数字が1 [詳解] | |
| void | block72 () |
| アナログ数字が7,デジタル数字が2 [詳解] | |
| void | block73 () |
| アナログ数字が7,デジタル数字が3 [詳解] | |
| void | block74 () |
| アナログ数字が7,デジタル数字が4 [詳解] | |
| void | block75 () |
| アナログ数字が7,デジタル数字が5 [詳解] | |
| void | block76 () |
| アナログ数字が7,デジタル数字が6 [詳解] | |
| void | block77 () |
| アナログ数字が7,デジタル数字が7 [詳解] | |
AIAnswerBlock.h の 11 行目に定義があります。
|
inline |
AIAnswerBlock.h の 19 行目に定義があります。
| void AIAnswerBlock::block00 | ( | ) |
アナログ数字が0,デジタル数字が0
AIAnswerBlock.cpp の 22 行目に定義があります。

| void AIAnswerBlock::block01 | ( | ) |
アナログ数字が0,デジタル数字が1
AIAnswerBlock.cpp の 70 行目に定義があります。

| void AIAnswerBlock::block02 | ( | ) |
アナログ数字が0,デジタル数字が2
| void AIAnswerBlock::block03 | ( | ) |
アナログ数字が0,デジタル数字が3
| void AIAnswerBlock::block04 | ( | ) |
アナログ数字が0,デジタル数字が4
| void AIAnswerBlock::block05 | ( | ) |
アナログ数字が0,デジタル数字が5
| void AIAnswerBlock::block06 | ( | ) |
アナログ数字が0,デジタル数字が6
| void AIAnswerBlock::block07 | ( | ) |
アナログ数字が0,デジタル数字が7
| void AIAnswerBlock::block10 | ( | ) |
アナログ数字が1,デジタル数字が0
| void AIAnswerBlock::block11 | ( | ) |
アナログ数字が1,デジタル数字が1
| void AIAnswerBlock::block12 | ( | ) |
アナログ数字が1,デジタル数字が2
| void AIAnswerBlock::block13 | ( | ) |
アナログ数字が1,デジタル数字が3
| void AIAnswerBlock::block14 | ( | ) |
アナログ数字が1,デジタル数字が4
| void AIAnswerBlock::block15 | ( | ) |
アナログ数字が1,デジタル数字が5
| void AIAnswerBlock::block16 | ( | ) |
アナログ数字が1,デジタル数字が6
| void AIAnswerBlock::block17 | ( | ) |
アナログ数字が1,デジタル数字が7
| void AIAnswerBlock::block20 | ( | ) |
アナログ数字が2,デジタル数字が0
| void AIAnswerBlock::block21 | ( | ) |
アナログ数字が2,デジタル数字が1
| void AIAnswerBlock::block22 | ( | ) |
アナログ数字が2,デジタル数字が2
| void AIAnswerBlock::block23 | ( | ) |
アナログ数字が2,デジタル数字が3
| void AIAnswerBlock::block24 | ( | ) |
アナログ数字が2,デジタル数字が4
| void AIAnswerBlock::block25 | ( | ) |
アナログ数字が2,デジタル数字が5
| void AIAnswerBlock::block26 | ( | ) |
アナログ数字が2,デジタル数字が6
| void AIAnswerBlock::block27 | ( | ) |
アナログ数字が2,デジタル数字が7
| void AIAnswerBlock::block30 | ( | ) |
アナログ数字が3,デジタル数字が0
| void AIAnswerBlock::block31 | ( | ) |
アナログ数字が3,デジタル数字が1
| void AIAnswerBlock::block32 | ( | ) |
アナログ数字が3,デジタル数字が2
| void AIAnswerBlock::block33 | ( | ) |
アナログ数字が3,デジタル数字が3
| void AIAnswerBlock::block34 | ( | ) |
アナログ数字が3,デジタル数字が4
| void AIAnswerBlock::block35 | ( | ) |
アナログ数字が3,デジタル数字が5
| void AIAnswerBlock::block36 | ( | ) |
アナログ数字が3,デジタル数字が6
| void AIAnswerBlock::block37 | ( | ) |
アナログ数字が3,デジタル数字が7
| void AIAnswerBlock::block40 | ( | ) |
アナログ数字が4,デジタル数字が0
| void AIAnswerBlock::block41 | ( | ) |
アナログ数字が4,デジタル数字が1
| void AIAnswerBlock::block42 | ( | ) |
アナログ数字が4,デジタル数字が2
| void AIAnswerBlock::block43 | ( | ) |
アナログ数字が4,デジタル数字が3
| void AIAnswerBlock::block44 | ( | ) |
アナログ数字が4,デジタル数字が4
| void AIAnswerBlock::block45 | ( | ) |
アナログ数字が4,デジタル数字が5
| void AIAnswerBlock::block46 | ( | ) |
アナログ数字が4,デジタル数字が6
| void AIAnswerBlock::block47 | ( | ) |
アナログ数字が4,デジタル数字が7
| void AIAnswerBlock::block50 | ( | ) |
アナログ数字が5,デジタル数字が0
| void AIAnswerBlock::block51 | ( | ) |
アナログ数字が5,デジタル数字が1
| void AIAnswerBlock::block52 | ( | ) |
アナログ数字が5,デジタル数字が2
| void AIAnswerBlock::block53 | ( | ) |
アナログ数字が5,デジタル数字が3
| void AIAnswerBlock::block54 | ( | ) |
アナログ数字が5,デジタル数字が4
| void AIAnswerBlock::block55 | ( | ) |
アナログ数字が5,デジタル数字が5
| void AIAnswerBlock::block56 | ( | ) |
アナログ数字が5,デジタル数字が6
| void AIAnswerBlock::block57 | ( | ) |
アナログ数字が5,デジタル数字が7
| void AIAnswerBlock::block60 | ( | ) |
アナログ数字が6,デジタル数字が0
| void AIAnswerBlock::block61 | ( | ) |
アナログ数字が6,デジタル数字が1
| void AIAnswerBlock::block62 | ( | ) |
アナログ数字が6,デジタル数字が2
| void AIAnswerBlock::block63 | ( | ) |
アナログ数字が6,デジタル数字が3
| void AIAnswerBlock::block64 | ( | ) |
アナログ数字が6,デジタル数字が4
| void AIAnswerBlock::block65 | ( | ) |
アナログ数字が6,デジタル数字が5
| void AIAnswerBlock::block66 | ( | ) |
アナログ数字が6,デジタル数字が6
| void AIAnswerBlock::block67 | ( | ) |
アナログ数字が6,デジタル数字が7
| void AIAnswerBlock::block70 | ( | ) |
アナログ数字が7,デジタル数字が0
| void AIAnswerBlock::block71 | ( | ) |
アナログ数字が7,デジタル数字が1
| void AIAnswerBlock::block72 | ( | ) |
アナログ数字が7,デジタル数字が2
| void AIAnswerBlock::block73 | ( | ) |
アナログ数字が7,デジタル数字が3
| void AIAnswerBlock::block74 | ( | ) |
アナログ数字が7,デジタル数字が4
| void AIAnswerBlock::block75 | ( | ) |
アナログ数字が7,デジタル数字が5
| void AIAnswerBlock::block76 | ( | ) |
アナログ数字が7,デジタル数字が6
| void AIAnswerBlock::block77 | ( | ) |
アナログ数字が7,デジタル数字が7
| void AIAnswerBlock::throwBlock | ( | bool | angle_direction = false | ) |
リフターを使ってブロックを放って後ろを向く
ブロックを指定した方向へ放った後,後ろを向き直す
| angle_direction | [false = 左回転,true = 右回転] |
AIAnswerBlock.cpp の 14 行目に定義があります。

 1.8.6
1.8.6

