|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include <Navigator.h>
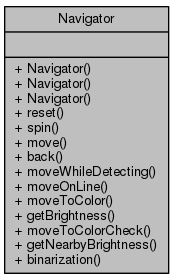
公開メンバ関数 | |
| Navigator (const Controller &controller_, const Walker &walker_) | |
| Navigator (const Controller &controller_) | |
| Navigator () | |
| void | reset () |
| 座標とエンコーダの値を初期化する [詳解] | |
| void | spin (float angle, bool clockwise=false, std::int8_t pwm=10) |
| 指定した角度まで走行体を回転させる(基本左エッジ) [詳解] | |
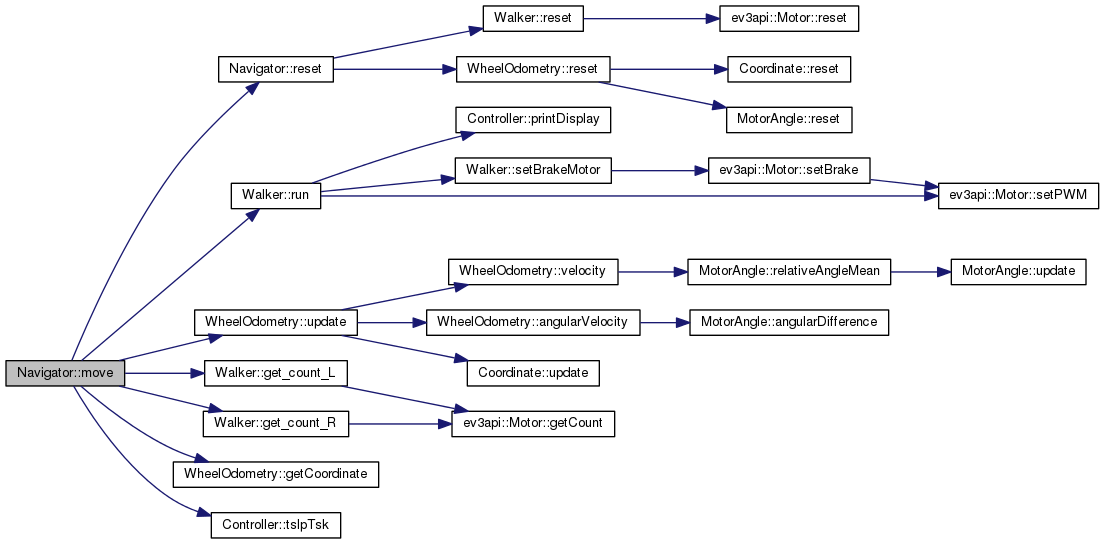
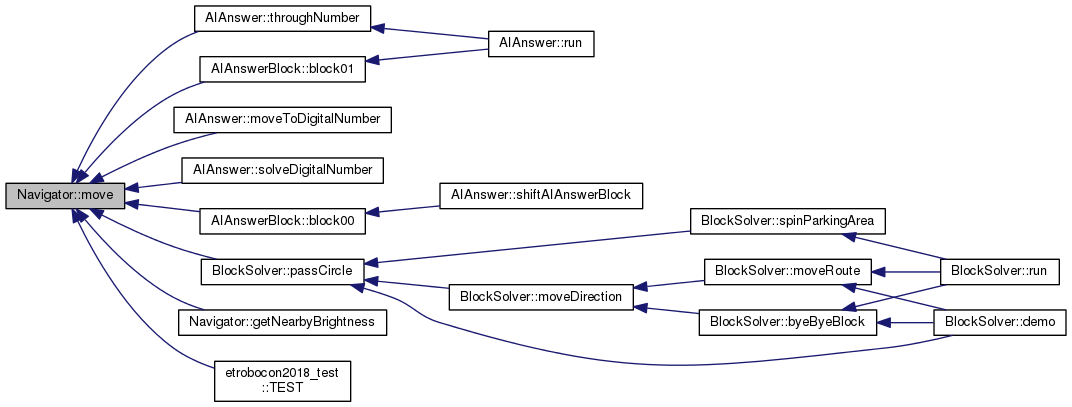
| void | move (float distance, std::int8_t pwm=20) |
| 指定した距離まで走行体を移動させる [詳解] | |
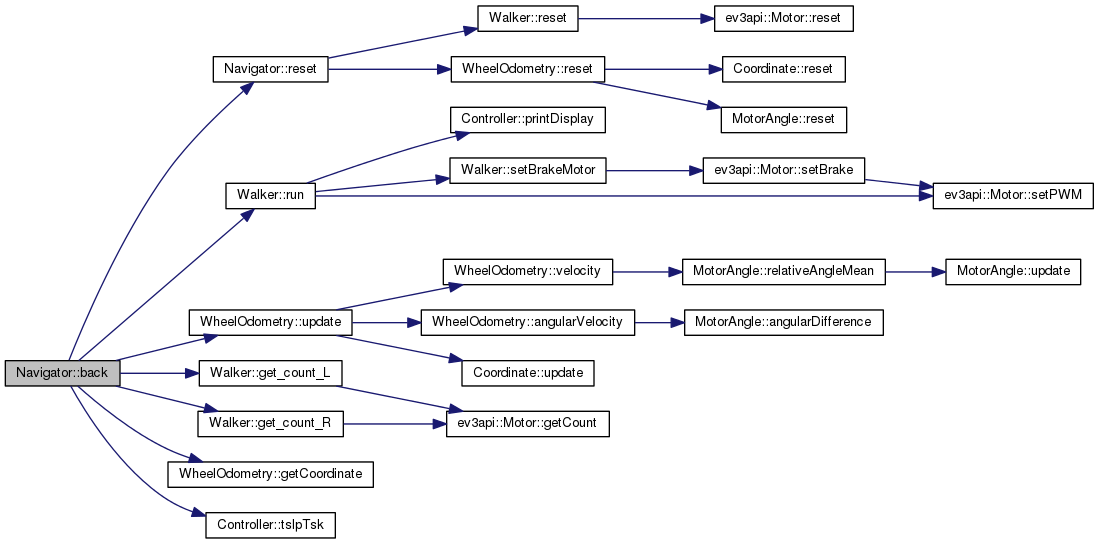
| void | back (float distance, std::int8_t pwm=10) |
| 指定した距離まで走行体を後退させる [詳解] | |
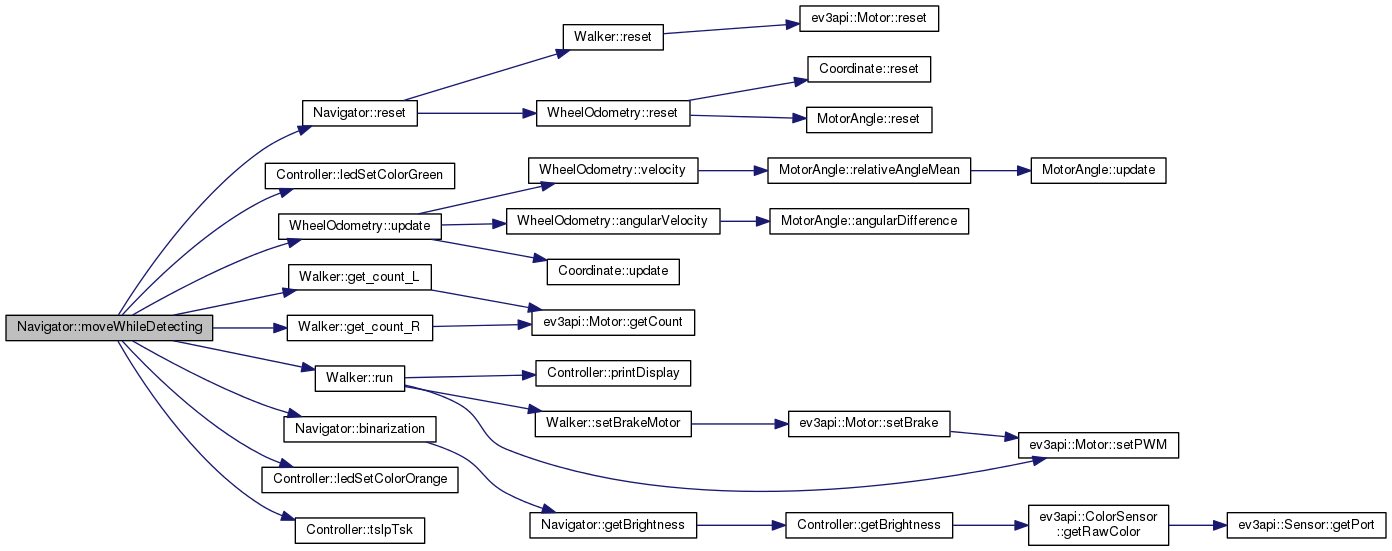
| void | moveWhileDetecting (float distance, std::int16_t target, std::int8_t pwm=10) |
| 指定した距離まで黒色の点を検出しながら走行体を移動させる [詳解] | |
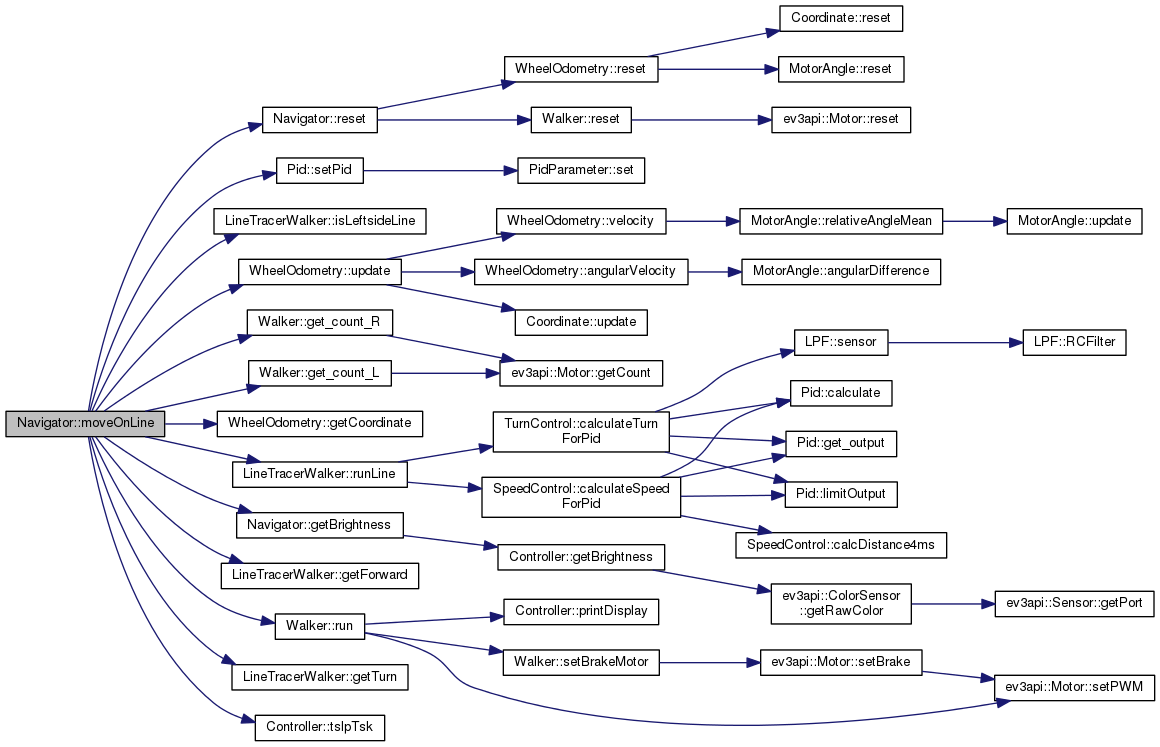
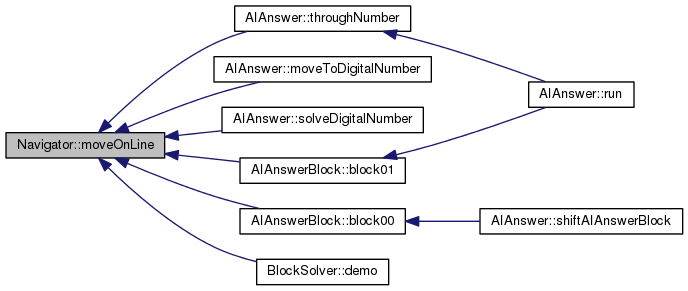
| void | moveOnLine (float distance, std::int16_t target, std::int8_t pwm=20, bool is_leftside_line=true) |
| 指定した距離だけライントレースする [詳解] | |
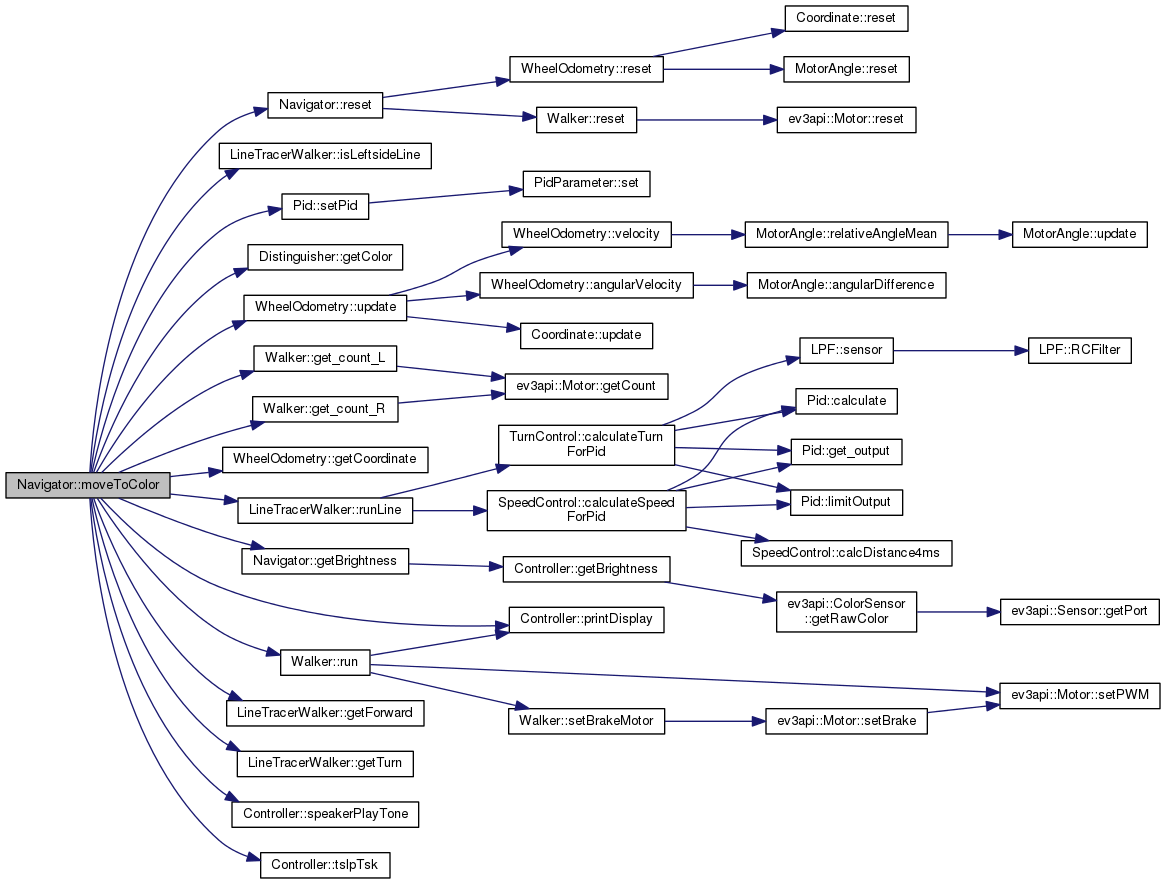
| void | moveToColor (float distance, std::int16_t target_brightness, Color target_color, std::int8_t speed=20, bool is_leftside_line=true) |
| 指定した距離分ライントレースして指定した色があると停止する [詳解] | |
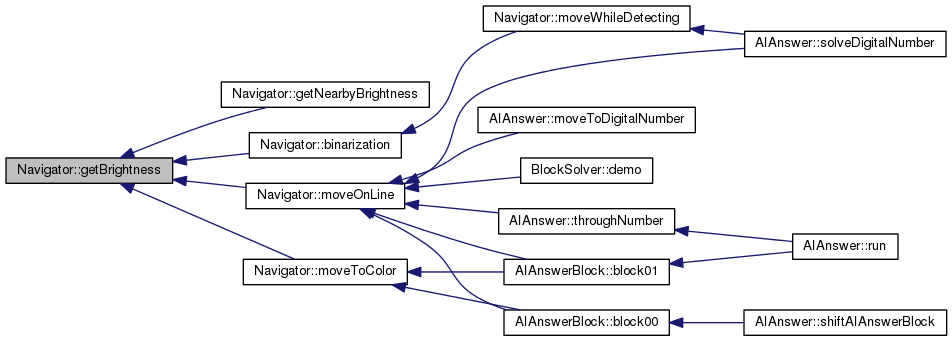
| std::int16_t | getBrightness () |
| 光センサの値を取得する [詳解] | |
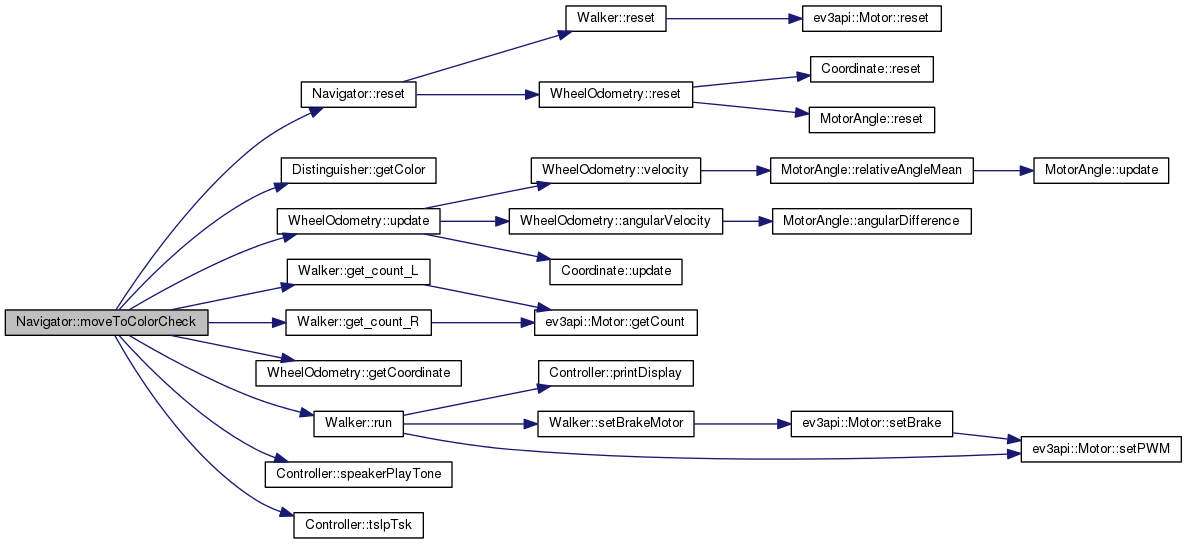
| void | moveToColorCheck (float distance, Color target_color, std::int8_t pwm=20) |
| 指定した距離特定の色を探しながら進む(ライントレースしない) [詳解] | |
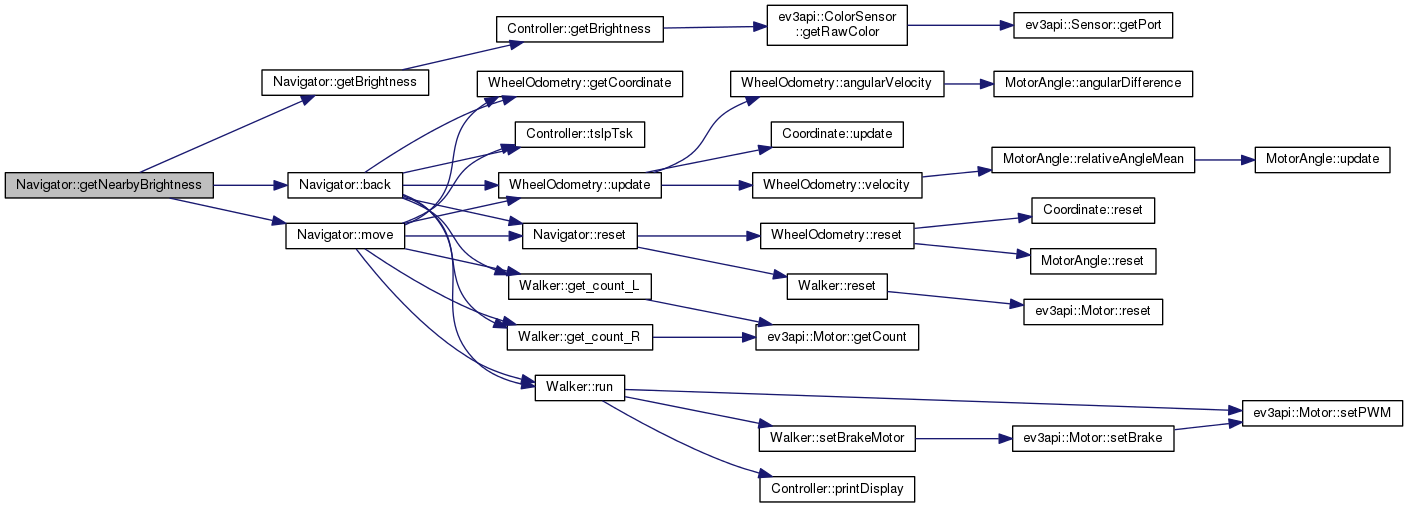
| std::int8_t | getNearbyBrightness (float distance=20.0f) |
| 現在位置の周辺における光センサ値を取得する [詳解] | |
| bool | binarization (std::int16_t target) |
| 2値化処理を実行する [詳解] | |
Navigator.h の 16 行目に定義があります。
|
inline |
Navigator.h の 26 行目に定義があります。
|
inline |
Navigator.h の 35 行目に定義があります。
|
inline |
Navigator.h の 44 行目に定義があります。
| void Navigator::back | ( | float | distance, |
| std::int8_t | pwm = 10 |
||
| ) |
指定した距離まで走行体を後退させる
| distance | 距離 [mm] |
| pwm | モータパワー |
Navigator.cpp の 72 行目に定義があります。

| bool Navigator::binarization | ( | std::int16_t | black | ) |
| std::int16_t Navigator::getBrightness | ( | ) |
| std::int8_t Navigator::getNearbyBrightness | ( | float | distance = 20.0f | ) |
現在位置の周辺における光センサ値を取得する
[Navigator::getNearbyBrightness]
| distance | 距離 [mm] |
Navigator.cpp の 126 行目に定義があります。
| void Navigator::move | ( | float | distance, |
| std::int8_t | pwm = 20 |
||
| ) |
指定した距離まで走行体を移動させる
| distance | 距離 [mm] |
| pwm | モータパワー |
Navigator.cpp の 48 行目に定義があります。
| void Navigator::moveOnLine | ( | float | distance, |
| std::int16_t | target, | ||
| std::int8_t | pwm = 20, |
||
| bool | is_leftside_line = true |
||
| ) |
指定した距離だけライントレースする
| distance | 距離 [mm] |
| target | 黒色と白色の境界の輝度値 |
| pwm | モータパワー |
| isLeftsideLine | true = 左エッジ,false = 右エッジ |
Navigator.cpp の 163 行目に定義があります。
| void Navigator::moveToColor | ( | float | distance, |
| std::int16_t | target_brightness, | ||
| Color | target_color, | ||
| std::int8_t | speed = 20, |
||
| bool | is_leftside_line = true |
||
| ) |
指定した距離分ライントレースして指定した色があると停止する
Navigator.cpp の 211 行目に定義があります。

| void Navigator::moveToColorCheck | ( | float | distance, |
| Color | target_color, | ||
| std::int8_t | pwm = 20 |
||
| ) |
指定した距離特定の色を探しながら進む(ライントレースしない)
Navigator.cpp の 191 行目に定義があります。

| void Navigator::moveWhileDetecting | ( | float | distance, |
| std::int16_t | black, | ||
| std::int8_t | pwm = 10 |
||
| ) |
指定した距離まで黒色の点を検出しながら走行体を移動させる
[Navigator::moveWhileDetecting]
| distance | 距離 [mm] |
| black | 黒色の輝度値 |
| pwm | モータパワー |
Navigator.cpp の 92 行目に定義があります。

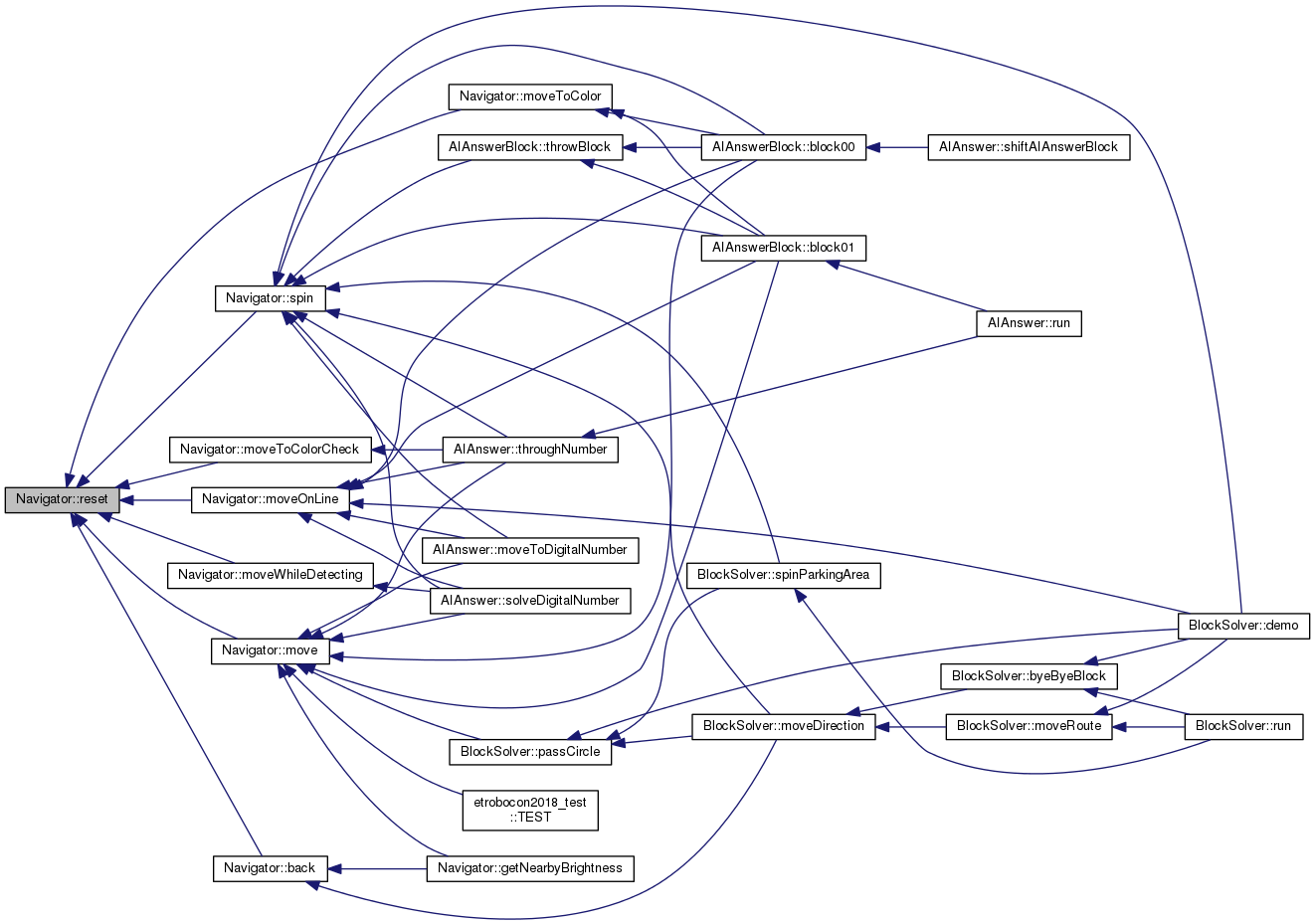
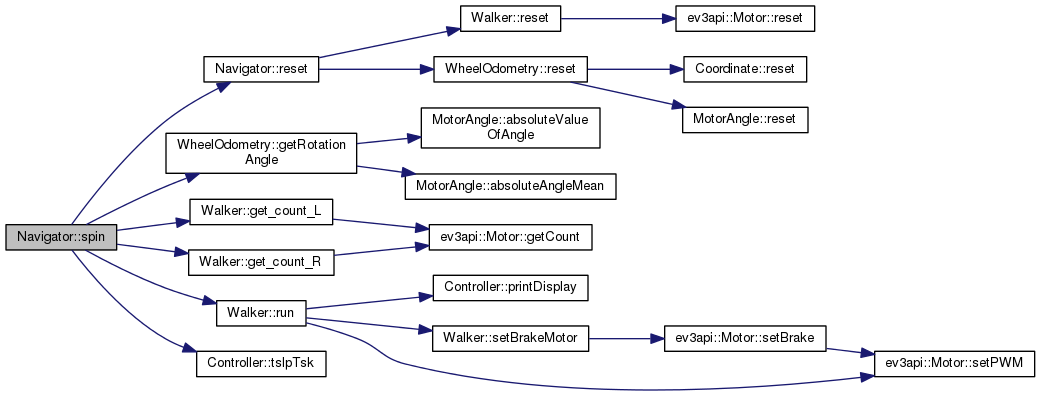
| void Navigator::reset | ( | void | ) |
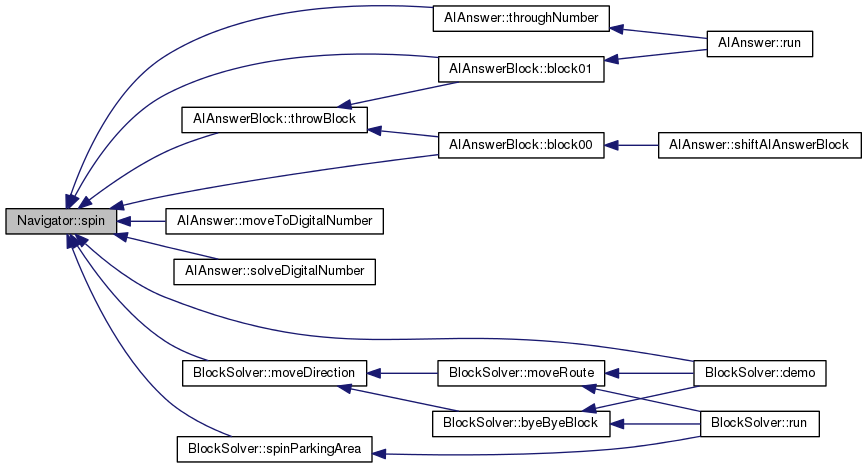
| void Navigator::spin | ( | float | angle, |
| bool | clockwise = false, |
||
| std::int8_t | pwm = 10 |
||
| ) |
指定した角度まで走行体を回転させる(基本左エッジ)
指定した角度まで走行体を回転させる
| angle | 回転角度 [deg] |
| clockwise | 時計回りに回転させるか(デフォルトは、反時計回り) |
| pwm | モータパワー |
Navigator.cpp の 25 行目に定義があります。
 1.8.6
1.8.6