|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
|
etrobocon2018 feat.KatLab
770af34cce41ae9c30c41303275e1add2daae0c3
(with uncommitted changes)
|
#include "ev3api.h"#include "Controller.h"#include "EtRobocon2018.h"#include "app.h"#include "kernel_cfg.h"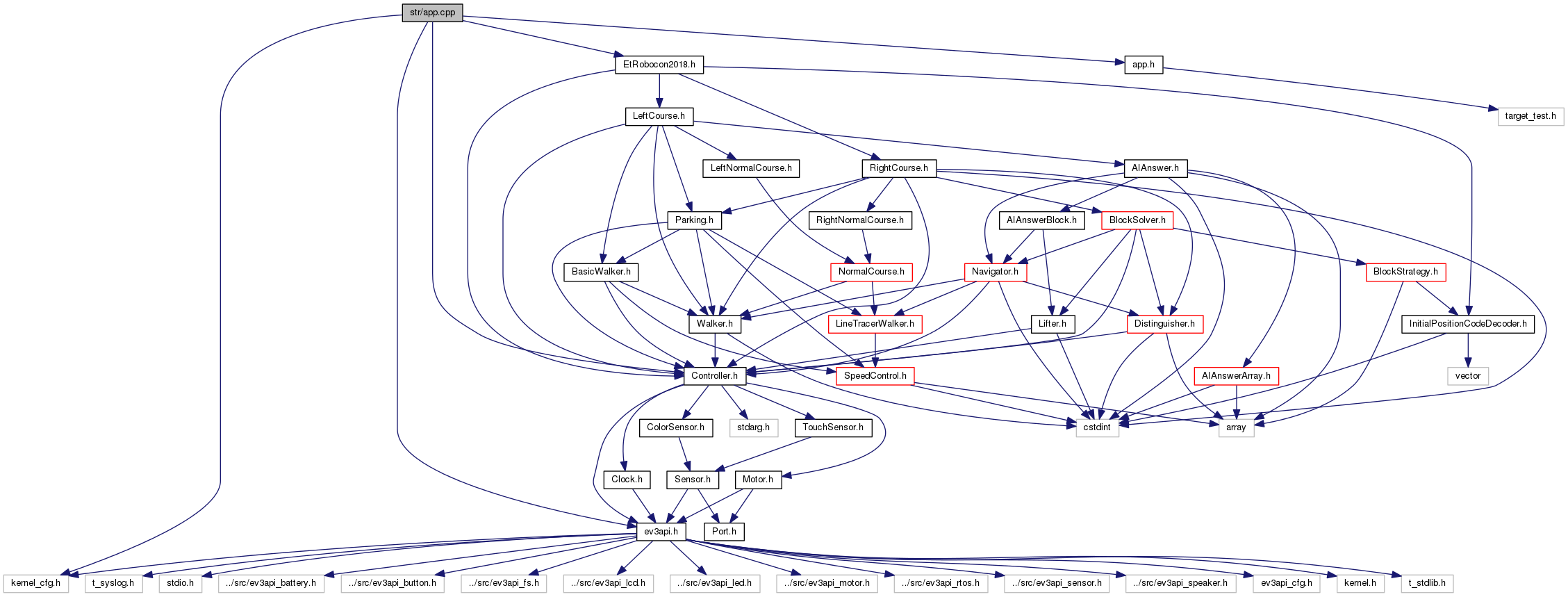
マクロ定義 | |
| #define | DEBUG |
| #define | _debug(x) (x) |
関数 | |
| void | __sync_synchronize () |
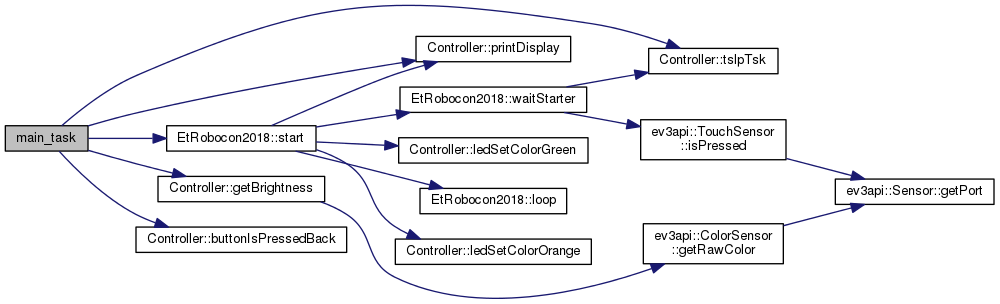
| void | main_task (intptr_t unused) |
| void | bt_task (intptr_t unused) |
| void __sync_synchronize | ( | ) |
| void bt_task | ( | intptr_t | unused | ) |
| void main_task | ( | intptr_t | unused | ) |
 1.8.6
1.8.6

