#include <EtRobocon2019.h>
EtRobocon2019 連携図
静的公開メンバ関数 | |
| static void | start () |
詳解
EtRobocon2019.h の 12 行目に定義があります。
関数詳解
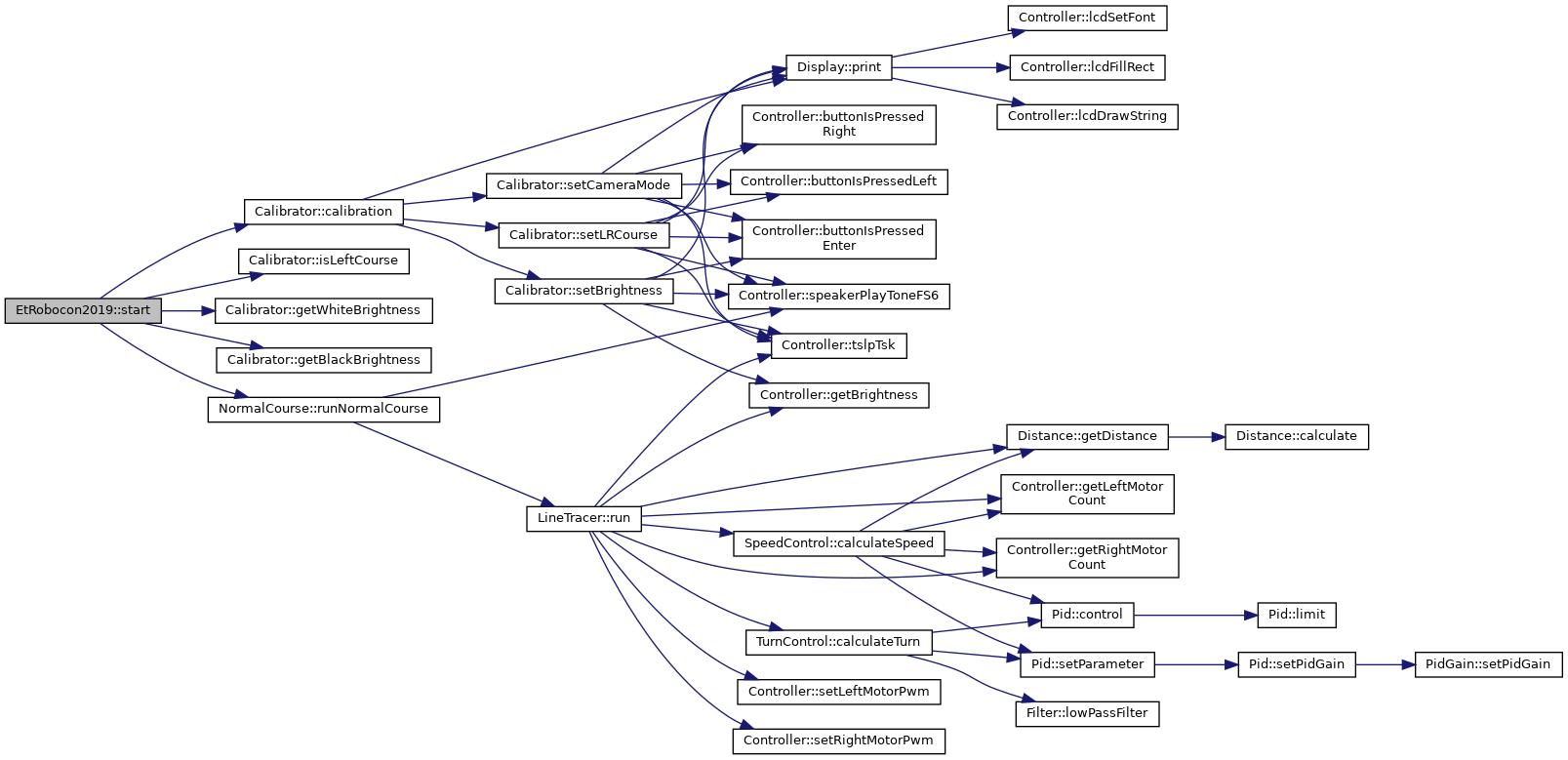
◆ start()
|
static |
EtRobocon2019.cpp の 8 行目に定義があります。
呼び出し関係図:
被呼び出し関係図:

このクラス詳解は次のファイルから抽出されました:
- src/module/EtRobocon2019.h
- src/module/EtRobocon2019.cpp
