#include <Navigator.h>
Navigator 連携図
公開メンバ関数 | |
| Navigator (Controller &controller_, double Kp_=0.60, double Ki_=0.0, double Kd_=0.0) | |
| Navigatorクラスのコンストラクタ [詳解] | |
| void | setPidGain (double Kp, double Ki, double Kd) |
| SpeedControl用のPidゲインのセッター [詳解] | |
| void | move (double specifiedDistance, int pwm=30, const double pGain=0.0) |
| specifiedDistanceの値でbackwardかforwardを呼び出す。 [詳解] | |
| void | moveAtSpecifiedSpeed (double specifiedDistance, int specifiedSpeed) |
| specifiedDistanceとSpeedControl.calculateSpeedから戻ってきたPWMをmoveに渡す [詳解] | |
| void | moveToSpecifiedColor (Color specifiedColor, int pwm=30) |
| void | spin (double angle, bool clockwise=true, int pwm=10) |
| 走行体を回頭させる(yawing) [詳解] | |
詳解
Navigator.h の 18 行目に定義があります。
構築子と解体子
◆ Navigator()
|
explicit |
Navigatorクラスのコンストラクタ
コンストラクタ
- 引数
-
&controller_ [Controllerインスタンスの参照] Kp_ [SpeedControl用のPゲイン] Ki_ [SpeedControl用のIゲイン] Kd_ [SpeedControl用のDゲイン]
Navigator.cpp の 10 行目に定義があります。
関数詳解
◆ move()
| void Navigator::move | ( | double | specifiedDistance, |
| int | pwm = 30, |
||
| const double | pGain = 0.0 |
||
| ) |
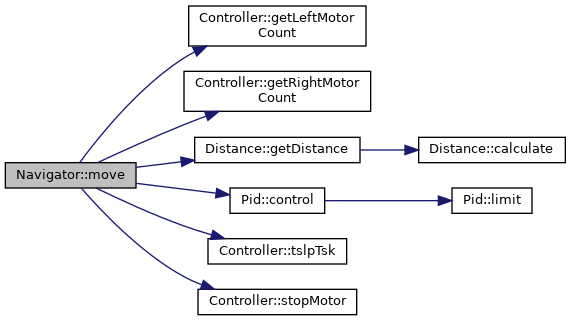
specifiedDistanceの値でbackwardかforwardを呼び出す。
前進と後進をする
- 引数
-
specifiedDistance [移動したい距離(mm)。正なら前進、負なら後進。] pwm [モータの強さ] pGain [PID制御におけるPゲイン (デフォルトは0.0なので指定しなければP制御は実行されない)]
- 戻り値
- なし
Navigator.cpp の 20 行目に定義があります。
呼び出し関係図:
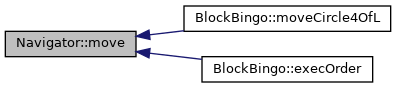
被呼び出し関係図:
◆ moveAtSpecifiedSpeed()
| void Navigator::moveAtSpecifiedSpeed | ( | double | specifiedDistance, |
| int | specifiedSpeed | ||
| ) |
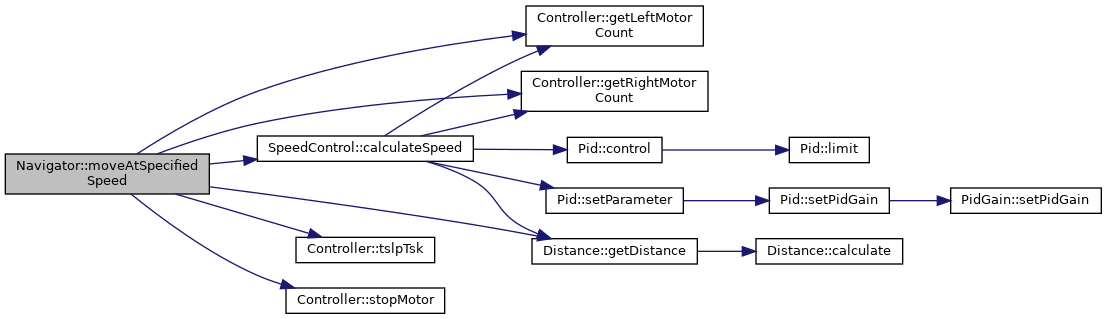
specifiedDistanceとSpeedControl.calculateSpeedから戻ってきたPWMをmoveに渡す
指定した速度で前進と後進をする
- 引数
-
specifiedDistance [移動したい距離(mm)] specifiedSpeed [移動したい速度]
- 戻り値
- なし
Navigator.cpp の 47 行目に定義があります。
Definition: SpeedControl.h:13
呼び出し関係図:
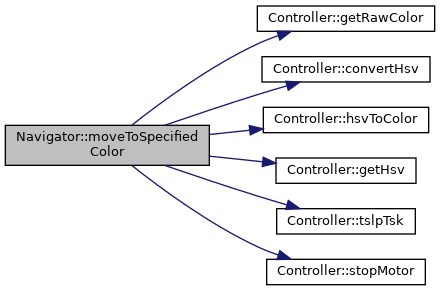
◆ moveToSpecifiedColor()
| void Navigator::moveToSpecifiedColor | ( | Color | specifiedColor, |
| int | pwm = 30 |
||
| ) |
指定した色まで前進と後進をする
- 引数
-
specifiedColor [指定する色] pwm [モータの強さ。正なら前進、負なら後進する]
- 戻り値
- なし
Navigator.cpp の 74 行目に定義があります。
呼び出し関係図:
被呼び出し関係図:

◆ setPidGain()
| void Navigator::setPidGain | ( | double | Kp, |
| double | Ki, | ||
| double | Kd | ||
| ) |
SpeedControl用のPidゲインのセッター
- 引数
-
Kp_ [SpeedControl用のPゲイン] Ki_ [SpeedControl用のIゲイン] Kd_ [SpeedControl用のDゲイン]
- 戻り値
- なし
Navigator.cpp の 15 行目に定義があります。
呼び出し関係図:

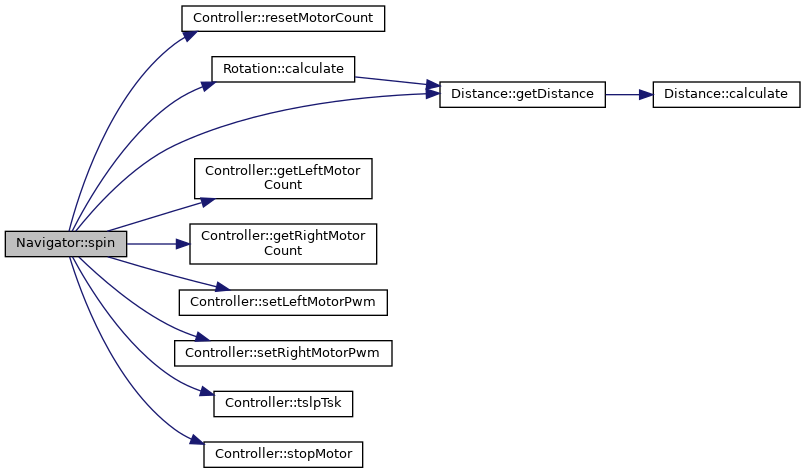
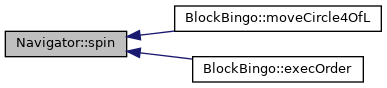
◆ spin()
| void Navigator::spin | ( | double | angle, |
| bool | clockwise = true, |
||
| int | pwm = 10 |
||
| ) |
走行体を回頭させる(yawing)
- 引数
-
angle [回頭角度(正の値)] clockwise [時計回りに回転するかどうか(デフォルトで時計回り)] pwm [モーターパワー]
Navigator.cpp の 97 行目に定義があります。
double calculate(const int leftAngle, const int rightAngle)
自転したときの角度を求める
Definition: Rotation.cpp:10
Definition: Rotation.h:11
呼び出し関係図:
被呼び出し関係図:
このクラス詳解は次のファイルから抽出されました:
- src/module/Navigator.h
- src/module/Navigator.cpp
